
南相馬ロボット産業協議会では、ロボット分科会というものを立ち上げようとしています。
おそらくは来年から始まると思うのですが、南相馬市の製造業は部品加工がメインの事業所が多く設計・制御を手がけている事業所が少ないのが実情です。
その背景には首都圏などからの大手企業からの仕事の依頼が多いので、あまり自分たちで企画提案してモノを作るというニーズがなかったためと私は考えています。
しかし、今の部品加工は中国などがいい例で、優れた加工設備があればどこでも作れてしまう(使いこなすオペレータは必要ですが)ため、他社との差別化が難しくなっていると感じています。
福島イノベーションコースト構想の補助事業に関わって今年で2年目になりましたが、こちらと比べて圧倒的な大手企業様に私のような田舎の会社でも提案できることは多数あり、喜んでいただけていると感じております。
(小さい会社の武器はフットワークの軽さと経験です)
この地域のものづくりがこのまま加工設備だけに左右されてしまうと、他の地域でも同様に工作機械などの助成が始まれば、「南相馬独自の強み」を持たない限り加工単価の兼ね合いで仕事が来なくなる可能性もあります。
また、会社の経営者が若い世代に仕事を譲る時に、そのころにはすでに老朽化した設備を譲っても事業を継続でるか心配でもあります。
震災がなくても過疎化する地方都市の製造業の今後の生き残りをかけて何をすべきか?
色々と考えていかなければなりません。
そこで冒頭に書いたロボット分科会があります。
南相馬市には世界に類のないロボットテストフィールドが作られます。
これまで過疎化が進むしかない地方都市の製造業にとっては新たなビジネスチャンスになるかもしれません。
南相馬の事業所の中でも単なる加工屋に終わらず、ロボットを学んで事業所のステージを上げたいという意見をもつ経営者さん達がおります。
そんな人たちが集まって、ロボットや制御を学ぼうというのがこの分科会になります。
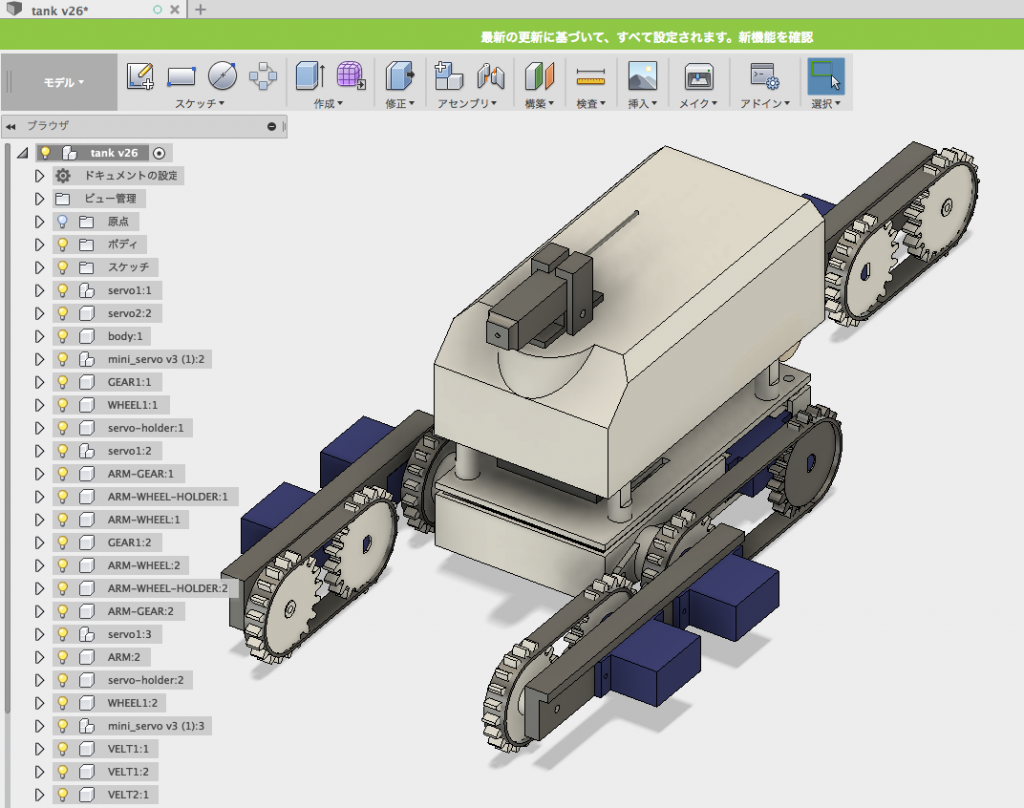
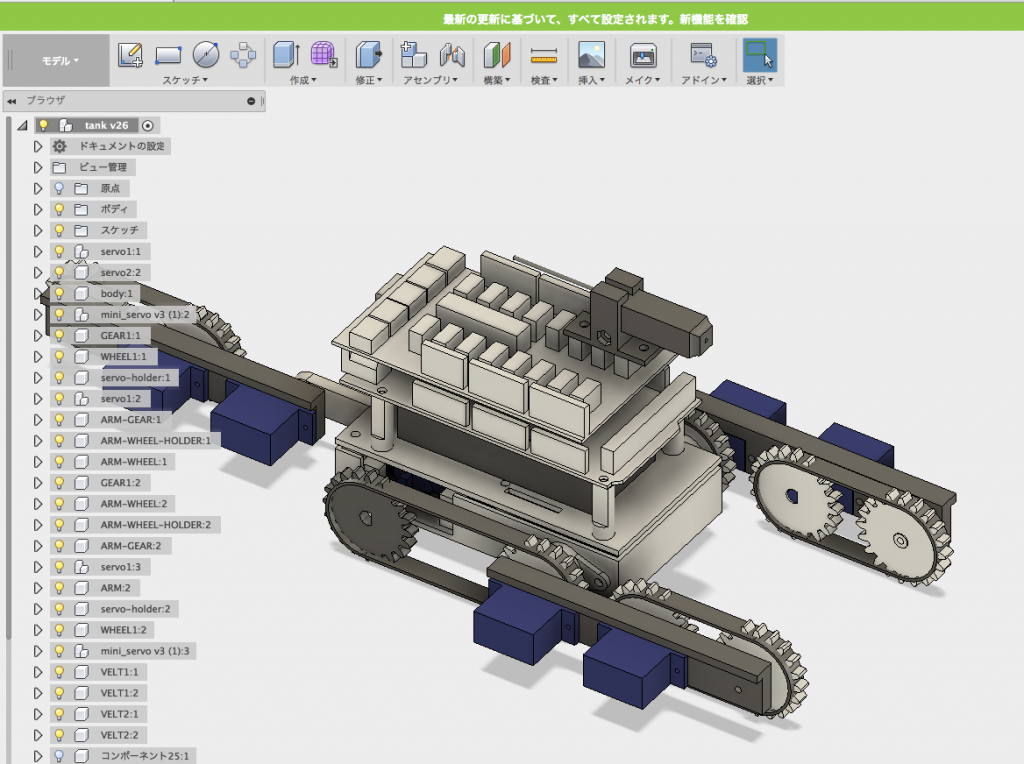
そこで基本的なクローラーロボットを自分たちで作って学習できないかと思い設計したのがこのロボットになります。
部品代を入れても1台1万円くらい。ボディなどの部品は3Dプリンタのデータを提供するので自社で製造できます。
こんなロボットを各自作って競技などができたら面白いよね。
マイコンはarduinoMEGA+GROVEで。
回転式サーボで駆動。アームの持ち上げ下げは通常の旋回型サーボで。
カメラは2.4GHzのワイヤレスを搭載。
XBeeを繋いでシリアル通信で制御しています。
変わっているところといえば、このロボット自体にコントロールするためのプログラムは書かれていなくて、各モーターへの指令だけをコマンドで送る感じになっています。
このように作れば、動きを変えたいときにロボットのプログラムを変えるのではなく、コントローラー側でロボットの動きを変えると反映されます。
この考え方はロボットミドルウエアのセミナーを聞いて思いつきました。
この手のロボットを作る場合、クローラーの手配をどうするかで悩みますが、3Dプリンタで弾性素材のフィラメントを使い自作しました。
そして組み立てたのがこちら。
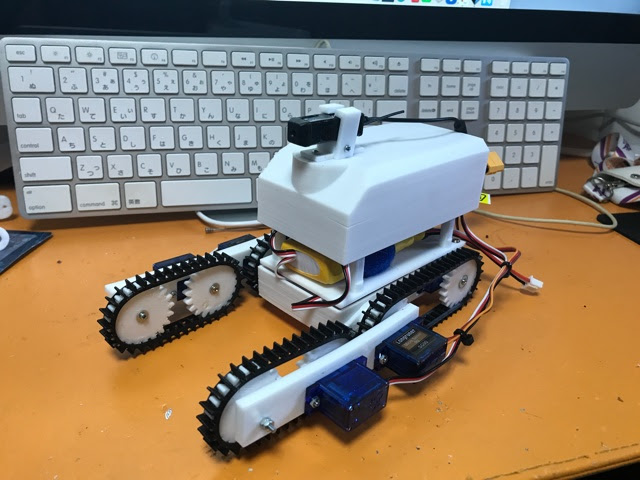
この形で段差を越えさせるためには、アームで段差を捉えてから下に押し付けて登るのですが、車体側のクローラーが上手に段差に乗らないと超えることができませんでした。
そこで、最初の設計図のような「後ろ足」を追加することになります。
自分で設計すればこのようにいくらでも改造できます。