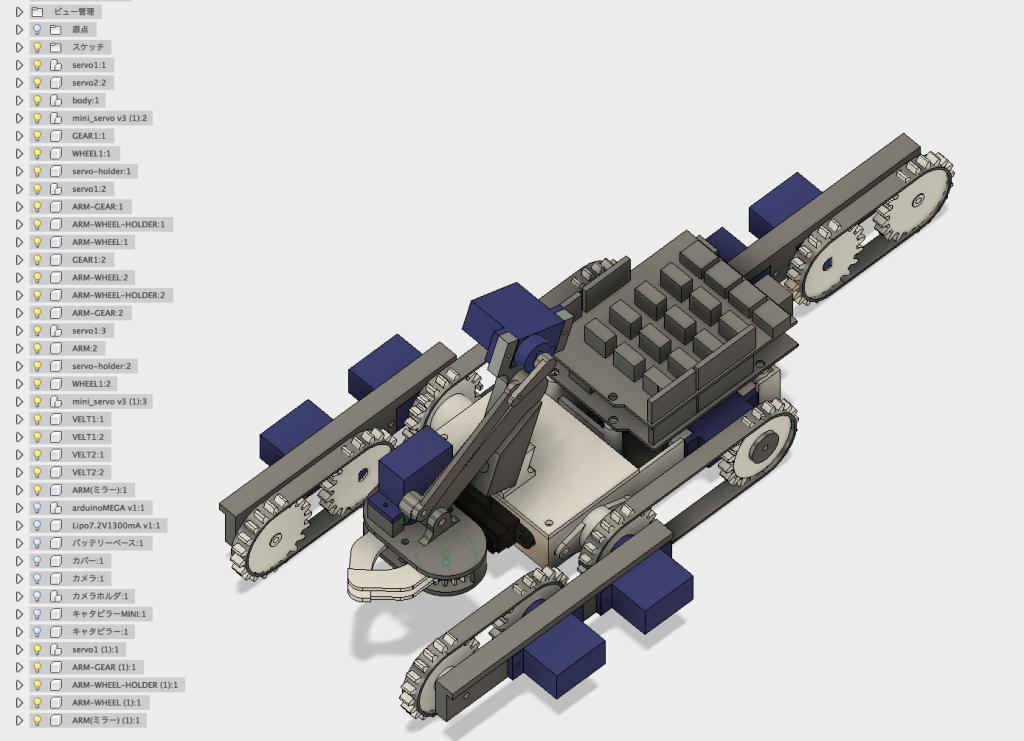
教材に使うクローラーロボットは、ビルドアップで拡張できるように設計しております。
現在、ミサイル発射台がついている部分をロボットアームに交換できるように設計してみました。
アームはリンク機構で荷重をサーボが直接受けないようにし、できるだけ重量物の根元を持ち上げるようにして駆動力を効率良く伝えられるようにしました。
ハンド部分は、建設機械の3つ爪をイメージしてギア駆動にしてみました。
こちらは倍力機構などを使っていないので把持力はちょっと低いかもしれません。

各種ソフトウェア開発および試作設計支援、パソコンサポート
教材に使うクローラーロボットは、ビルドアップで拡張できるように設計しております。
現在、ミサイル発射台がついている部分をロボットアームに交換できるように設計してみました。
アームはリンク機構で荷重をサーボが直接受けないようにし、できるだけ重量物の根元を持ち上げるようにして駆動力を効率良く伝えられるようにしました。
ハンド部分は、建設機械の3つ爪をイメージしてギア駆動にしてみました。
こちらは倍力機構などを使っていないので把持力はちょっと低いかもしれません。