
WRS2020でSTM部門で世界2位になったMISORAですが、そのコントローラにはいろいろな試みを盛り込んでいました。
その内容を技術論文としてJRM誌に投稿し査読を経て無事今月号に掲載していただきました。
執筆にあたっては英訳をしていただいた札幌大学の中村准教授、会津大学の屋代教授には大変お世話になりました。ありがとうございました。
掲載されたJRM誌はこちらからどなたでも無料でご覧いただけます。
最初DeepLでなんとかできるかなと思いましたがさすがに技術論文とかは全然で。。
また、論文を書いたことがなかったのでアドバイスを両教授より頂きました。
個人的にはCubeSwitchで特許出願をしたくらいに嬉しいです。
今回、結果を出せているのも堅牢で壊れないロボットを製造してくれた南相馬市の関係企業のお陰でもあります。
技術論文の要約を日本語で記載します。
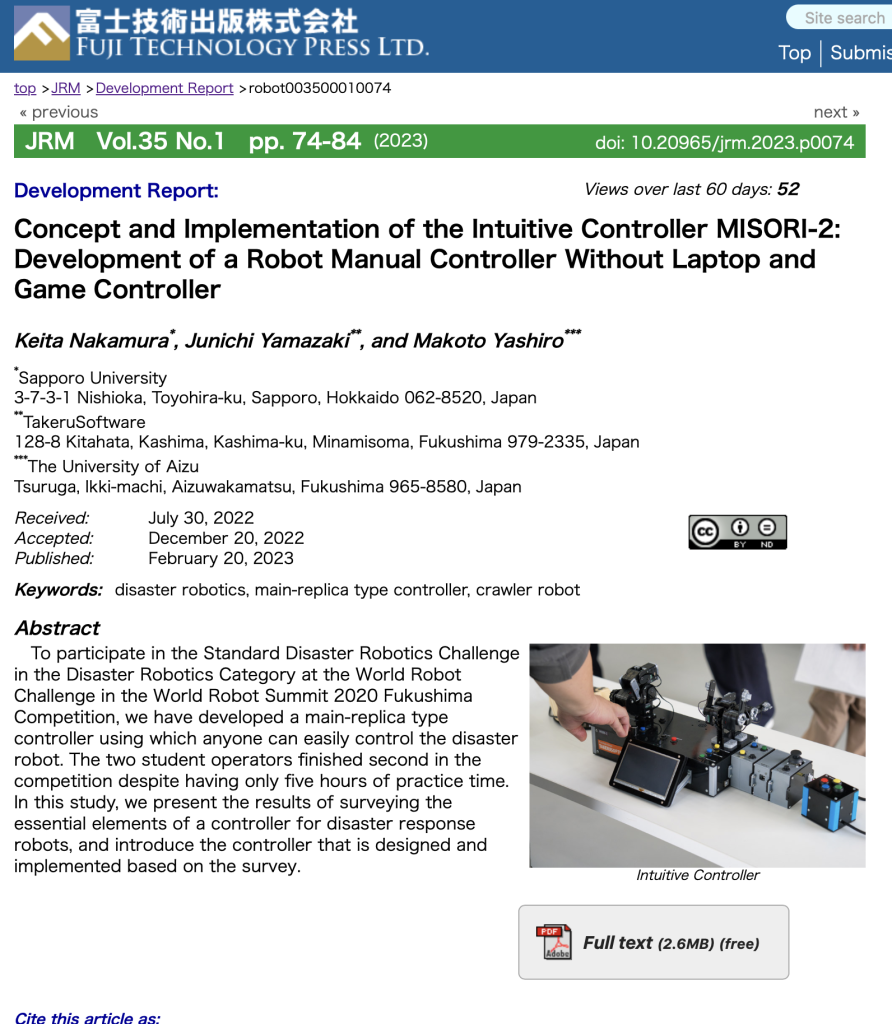
「ワールドロボットサミット2020福島大会の災害ロボット部門「スタンダード災害ロボットチャレンジ」に参加するため、誰でも簡単に災害ロボットを制御できるメインレプリカ型コントローラーを開発しました。2名の学生オペレーターは、わずか5時間の練習時間にもかかわらず、大会で2位に入賞しました。本研究では、災害対応ロボットのコントローラーに必要な要素を調査した結果と、調査に基づいて設計・実装されたコントローラーを紹介します。」
操作経験のない人でもすぐに簡単に操作できるロボットのインターフェイス作りは今回の大会に参加するにあたり一番の目標に掲げたものでした。
競技会であるならば熟練のオペレーターがロボットの操作を鍛錬し参加すれば結果が出ますが、実際の災害現場というものはいつ起きるかわからないものに、鍛錬なしに担当者が対応しなければならない未知の現場になります。
アニメのヒーローのような天才パイロットが出てくることなどないので、いかに今いる人員で災害に対応できるかが鍵になると考えました。
MISORI-2はそのコンセプトで作ったロボットコントローラになります。
そしてちゃんと結果も出せました。
オペレータを2名にしたのも「優れたヒーロが1人いてロボットを使いこなす」わけではなく、「誰でもオペレータになれる」考えを含んでいます。
また、大会で唯一、ROSもパソコンも使わない制御系にしたのもそれらのトラブルに高校生(経験のないオペレータ)では対応できないと考えたからです。