昨日、2回目のセミナーが終わりました。
基本的に1回目のセミナーと同じ内容を行います。
参加者は参加しやすい曜日のセミナーに出る感じです。
1回目の反省を踏まえてスライドショーでストーリーを作り、それに沿って講義を行いましたのでスムーズに講習が終わりました。
ドライバーやカッターを持つのが久しぶりな受講者も多く、最初は不慣れな感じでしたが1時間ほどで作業の進捗が高まり早く組み立てることができました。
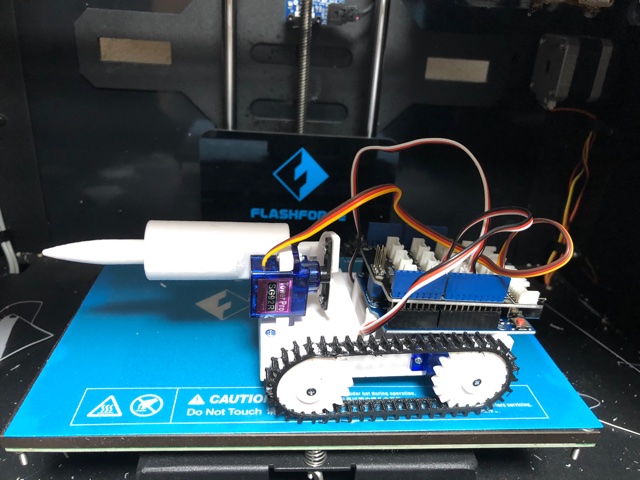
ロボットを組み立てて動作を確認した後に、マイコンの講義を始めます。
これから使うarduinoの説明、基本的な電源や信号の電圧の事、入力にはデジタルとアナログがあることなどなど。
そのことを踏まえてコネクタインで簡単に回路を構築できるGROVEでボタンをタッチスイッチに変えたり、リレーをLEDに変えたりして「同一プログラムでも目的によって入出力デバイスを置き換えることで目的の動作ができる」ということを学びます。
本来なら、ボタンを押したときにプルアップされた信号電圧がGNDに落ちてマイコンが入力を検出するという部分まで語った方がいいのでしょうけど、初心者向けのセミナーですし、最初のとっかかりから理論先行で行くと飽きるし覚えないので、まずは動きを確認し自分で組んだものが動いたという体験をしてもらうようにしました。