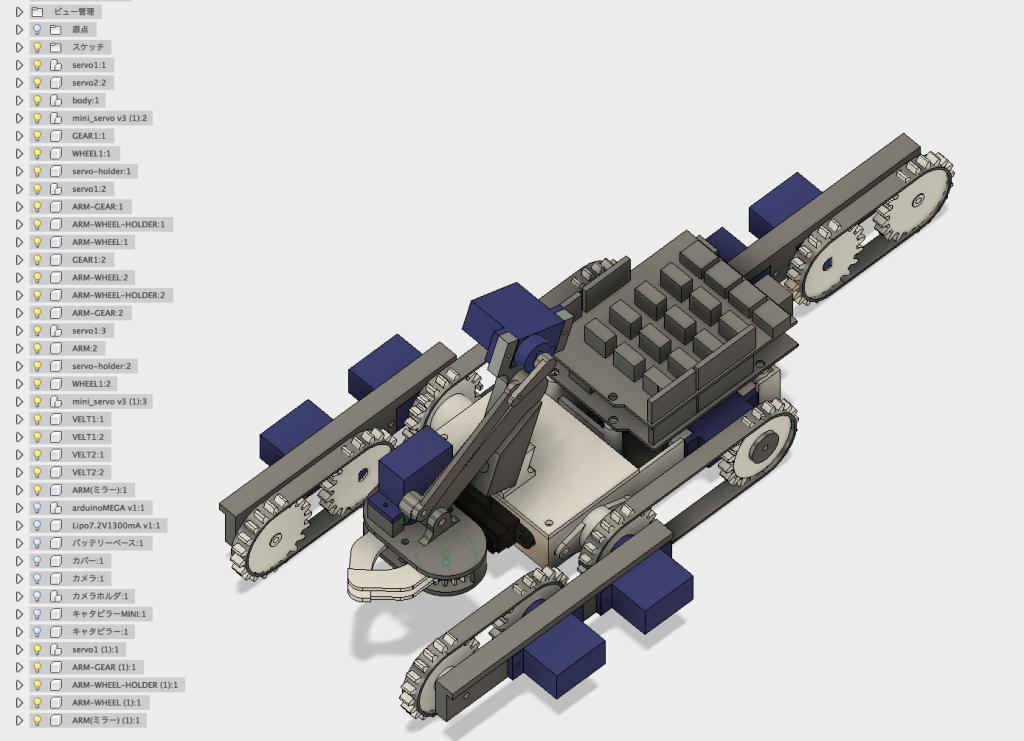
教材に使うクローラーロボットは、ビルドアップで拡張できるように設計しております。
現在、ミサイル発射台がついている部分をロボットアームに交換できるように設計してみました。
アームはリンク機構で荷重をサーボが直接受けないようにし、できるだけ重量物の根元を持ち上げるようにして駆動力を効率良く伝えられるようにしました。
ハンド部分は、建設機械の3つ爪をイメージしてギア駆動にしてみました。
こちらは倍力機構などを使っていないので把持力はちょっと低いかもしれません。

ロボット教育支援・パソコンサポート
教材に使うクローラーロボットは、ビルドアップで拡張できるように設計しております。
現在、ミサイル発射台がついている部分をロボットアームに交換できるように設計してみました。
アームはリンク機構で荷重をサーボが直接受けないようにし、できるだけ重量物の根元を持ち上げるようにして駆動力を効率良く伝えられるようにしました。
ハンド部分は、建設機械の3つ爪をイメージしてギア駆動にしてみました。
こちらは倍力機構などを使っていないので把持力はちょっと低いかもしれません。
ゆめサポート南相馬において、ロボット研究会事前セミナーを行いました。
これは、実際のセミナーを開始するまえに、セミナーの指導ボリュームが適切であるか検証するためのものです。
ロボットの概要から始まり、クローラーロボットの製作、マイコンボードを使った、デジタル・アナログ入力、デジタル・アナログ出力を学びました。
クローラーロボットの組み立ては熟練者で30分程度ですが、ドライバーを使ったことがないレベルの人の場合2時間ほどかかりました。