サーボモーターのパラメータを調整していないので元気よすぎる動きになっています。
なお、階段昇降モードの時は、フロントのクローラーアームをあげてから前進して登る動作をするようになると思います。
下記のリンクをクリックすると動画が開きます。

ロボット教育支援・パソコンサポート
サーボモーターのパラメータを調整していないので元気よすぎる動きになっています。
なお、階段昇降モードの時は、フロントのクローラーアームをあげてから前進して登る動作をするようになると思います。
下記のリンクをクリックすると動画が開きます。
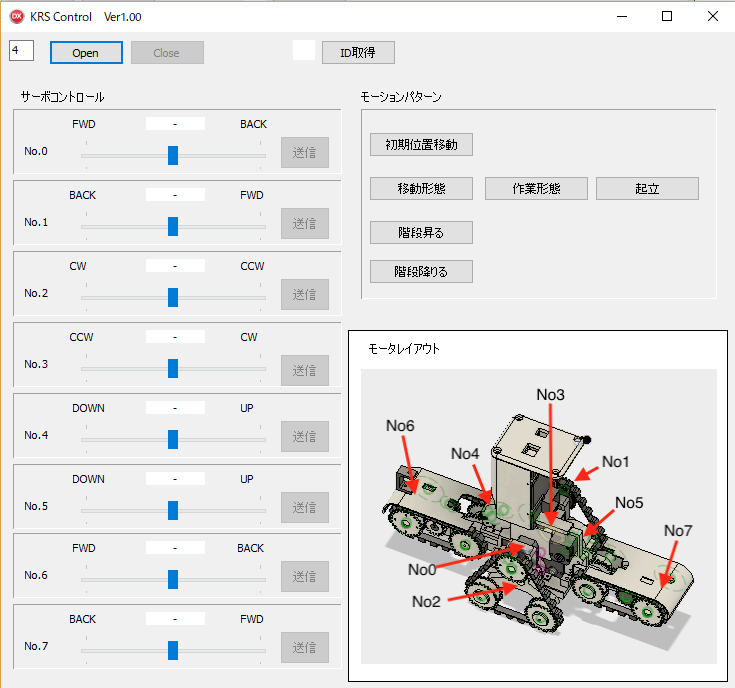
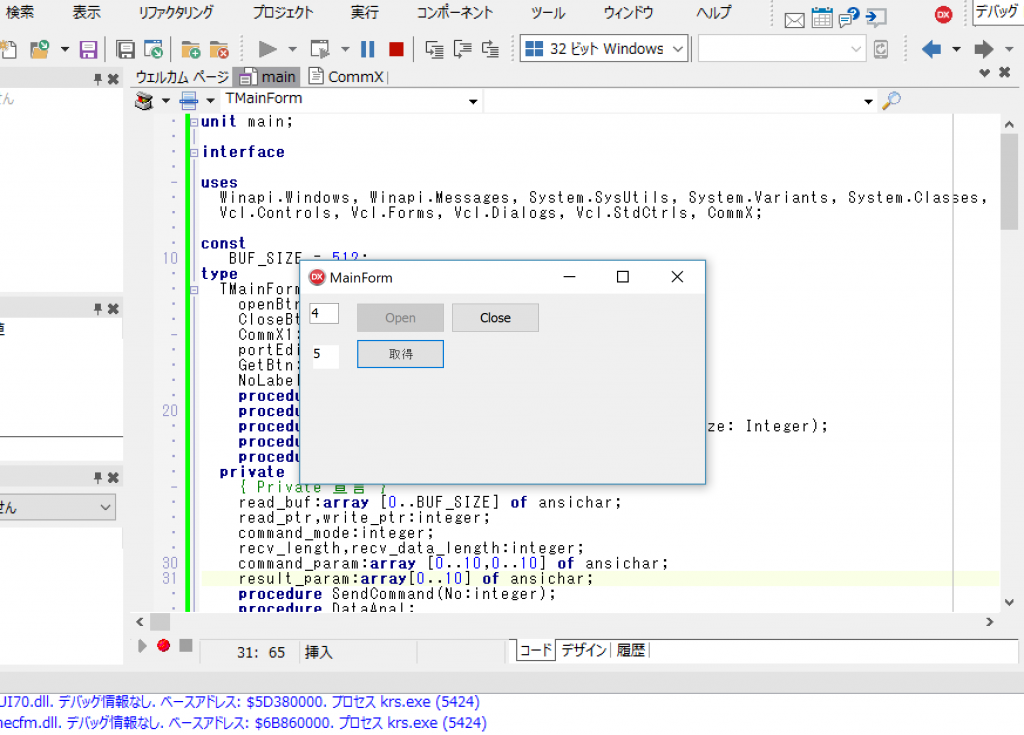
ロボットのモーションコントロール用のアプリができました。
各軸のスライダをいじって姿勢を決めて、それをボタンに割り付けて姿勢をコントロールさせようかと思います。
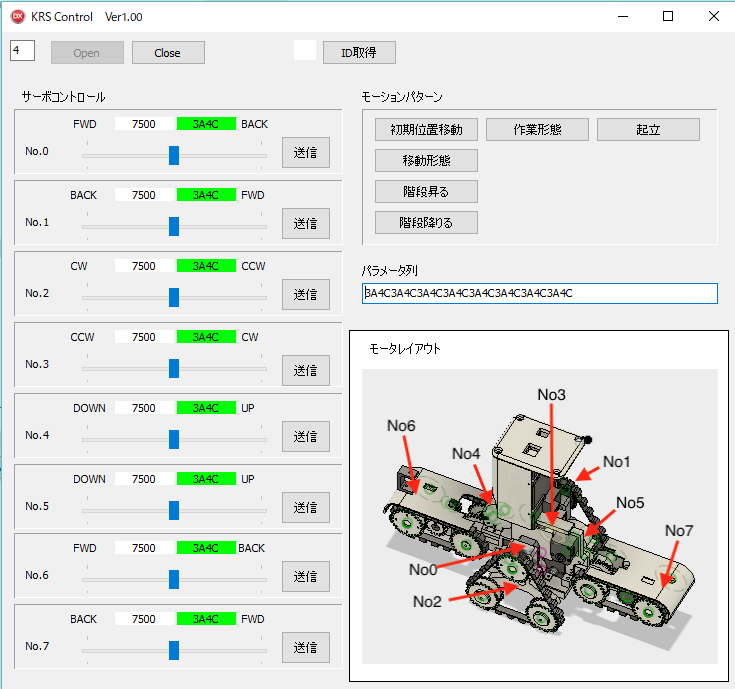
使ううちに仕様を変更したり拡張したくなりますが、サーボに渡す数値をパラメーター列として取得したかったので対応しました。
8軸分のパラメータ文字列ができますので、それをプログラム内に貼り付け、分解して転送する機能を実装すると、モーション割り当てボタンをクリックするだけで再現できると思います。
本来なら、ボタンよりもリストで連携させた方がユーザーレベルでも使えるツールになるのですが、市販の予定もないツールなのでプログラムに直接埋め込んでいきます。
今日は午前中でPCサポートの仕事が終わったので、午後からロボットのモーションコントロールソフトの開発の続きをしています。
開発はDelphiというpascal言語で行います。
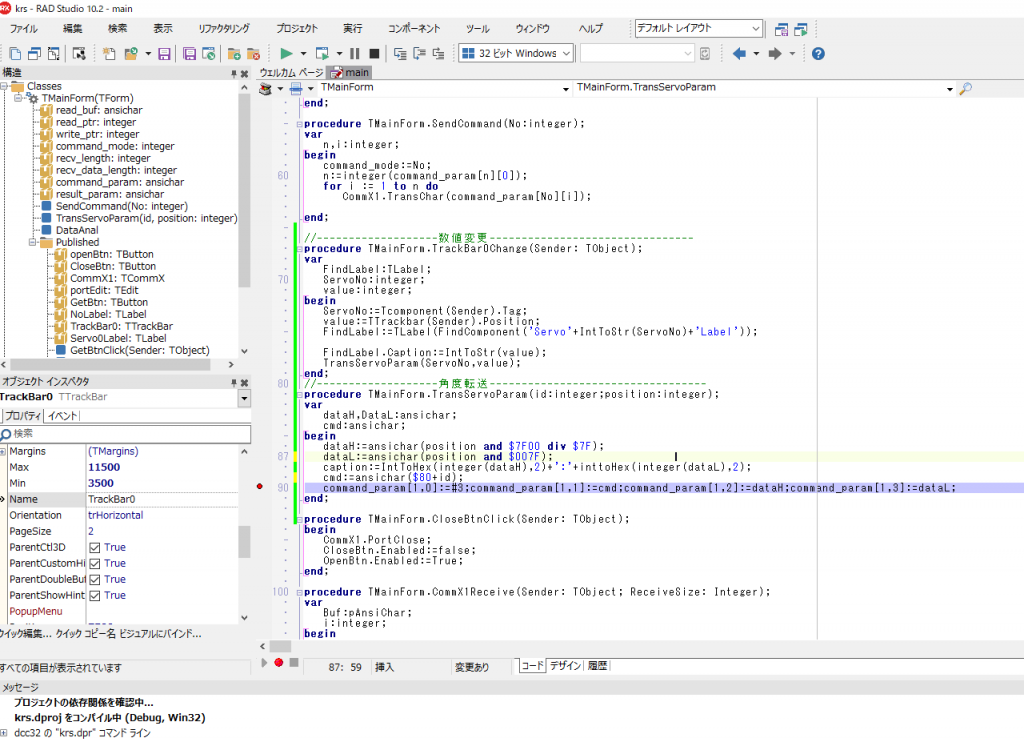
IDEなので実行を途中で止めて変数の中身などを確認できるのでデバッグもはかどります。
KRSサーボ は0x80+id番号と2バイトのポジションフレームで角度データを転送しますが、それぞれの上位15bit目はマスクして転送します
。
なので、上位1バイトは0x7Fでアンドをとってから0x7Fで割ってシフトし、下位1バイトはそのまま0x7Fでマスクする様になります。
弊社の強みは、メカのプロトタイプ設計から造形、マイコンやPCのアプリ開発まで1人でできる所にあります。
地元企業様のご協力で、敷地内の建物を間借りして作業場として使えるようになりました。
金曜日に伺い、持ち込んだパソコンの設定などをしていきたいと思います。
現在の作業場が3畳くらいのスペースでとてもではないですけど、限界で・・。
部材などを片付ければいいのでしょうが、なかなか・・・。
場所を借りる条件として、その職場の業務改善のお手伝いもする様になります。
メインは社内治具の設計アドバイスになると思います。
製造の現場では効率よく作業するために、様々な専用の道具が必要になります。
少しでも力になれれば、こちらの仕事にもつながりますし、頑張っていこうと思います。
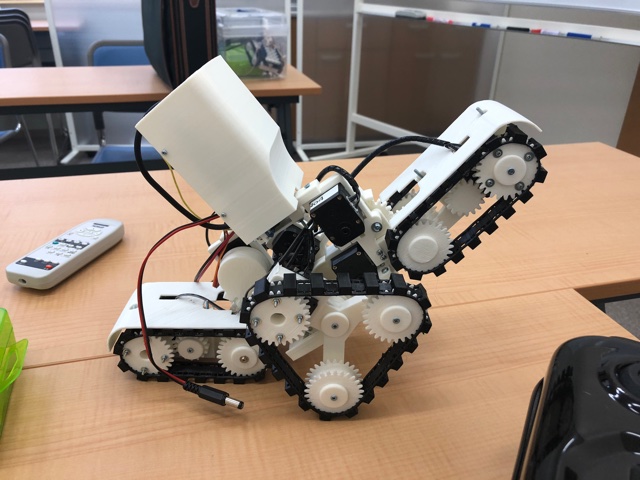
現在製作しているロボットは、シュチュエーションによって適した形態に変形させようと思っているのですが、そのためには8つのサーボモーターを自在に設定し、一度に呼び出せる処理をしなければなりません。
まずは、windowsでUSBアダプタ経由でコマンドを送りサーボを駆動するプログラムを開発することにしました。
近藤科学のサーボはICSという規格でシリアル通信でコントロールすることが出来るため、ソフトウェアリファレンスのコマンドパラメータを見て製作しています。
まずは、サーボモーターのIDを取得する処理を書いてみました。
シリアルポート4番につないだID番号5のサーボモータを読みだした結果、正しく読み出せていることを確認できました。
このプログラムを発展し、スライドバーなどを追加して各軸を自由に動かせるようにしてみたいと思います。
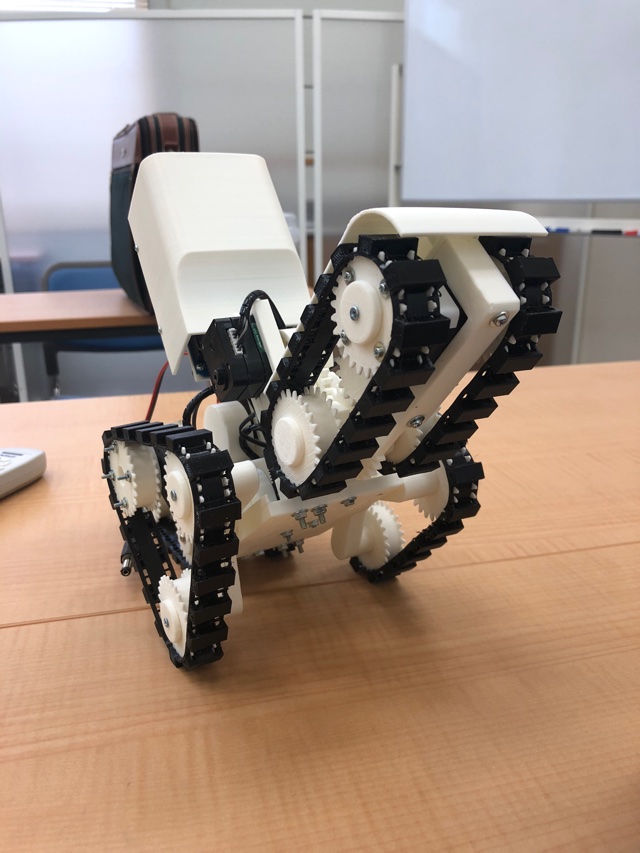
本日は、ロボット製作セミナーの2回目でした。
まったくプログラム経験の無い方々に、arduinoを使ったプログラムを解説します。
内容的には、プログラムを読み解く力を養うために必要な最低限の解説として、プログラムブロックの説明、マイコンのピンモードに割付の仕方、delayによる待ち処理、変数と定数、constを使ってマジックナンバーが出ないプログラムの作り方の解説、変数の型の説明とbyte型に範囲を超える数値を入れるとどうなるかの実験、2進数、10進数の説明などなど色々と盛り込みました。
結果実際の8割程度の進捗で終わる形に。
初めてのセミナーなので、理解度に合わせてボリュームを調整しなければならず、時間の見積もりが難しいです。
写真は、現時点でできているロボットの説明をしたときのものです。
現在のセミナーを学習していくといずれはこのようなロボットの制御も行えることをお話ししました。
個人的には現在の線量はかなり落ち着いて西日本あたりと大差ない状態になってますし、森林火災による拡散の懸念もさほどなかったこと、主要な部分にはまだ設置されたままになること、維持費もかかること、景観を損ねることから線量計の撤去は賛成です。
しかし、事故の象徴だったものが無くなるのもなんなので、ソーラーパネルで動く温度計を設計してみました。
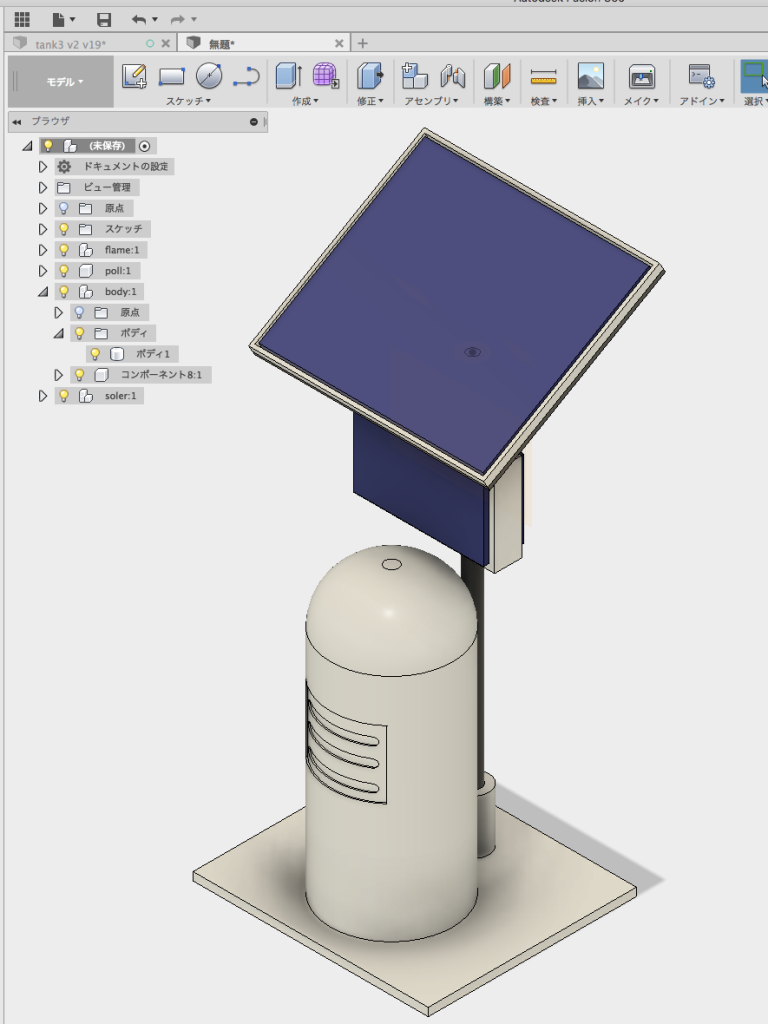
何かに似ているかもしれませんが、きっと気のせいです。
実際にモーターの配線を始めると、駆動ギヤにケーブルが巻き込まれないように取り回しを検討しなければなりません。
制御盤の様に配線が動かない場合には設計段階からケーブルの取り回しを構想できますが、ロボットのように動くものの場合はケーブルの剛性やたわみ具合により試作をして実機で確認した方がいい感じで取り回せると思います。
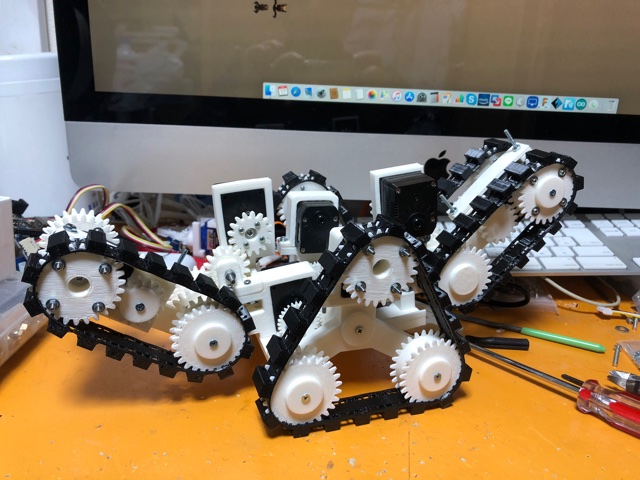
現時点で試作したロボットの配線を行い、使用するマイコンボードを搭載してケーブルの取り回しを考えつつカバーの設計を行いました。
カバーがつくとロボットらしくなりますね。

南相馬市内の企業に安倍首相が訪問されました。
そこで現在、IHI殿と開発をしている災害対応ドローンの模型を展示していただきました。
この模型は実際に飛ぶモデルで、フライトコントローラのパラメーターなどを調整しております。
弊社は今回のIHI殿が製作している災害対応大型ドローンの物資保持機構の制御とカメラシステムの制御&メカ開発を担当いたしました。
弊社は外注のため、表舞台に出ることはありませんがこれまで行ってきた業務の成果を県知事を始め復興大臣殿にも見ていただけて大変光栄に思いました。
IHI殿が開発している大型ドローンは首相官邸のHPから見ることができます。
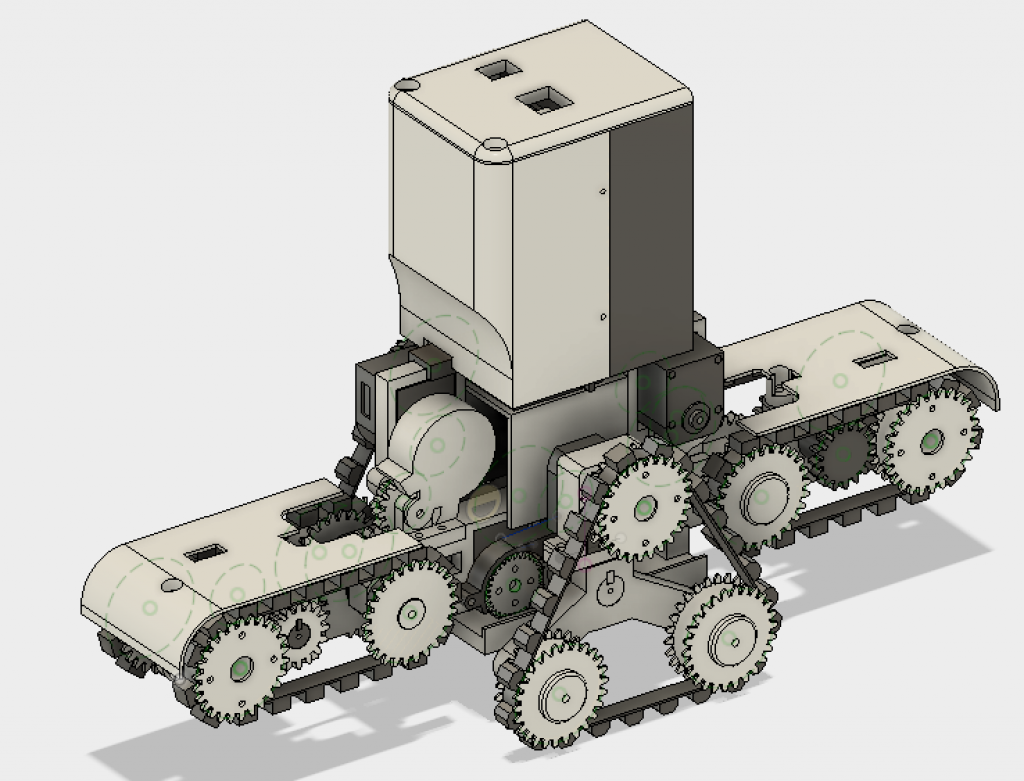
前後アームクローラーを取り付けて、全体の仮組みが終わりました。
あとは、サーボの設定用アダプタが届けば軸の設定ができるようになります。
今回使われているサーボは初めて使うので覚えることが多いでしょうね。