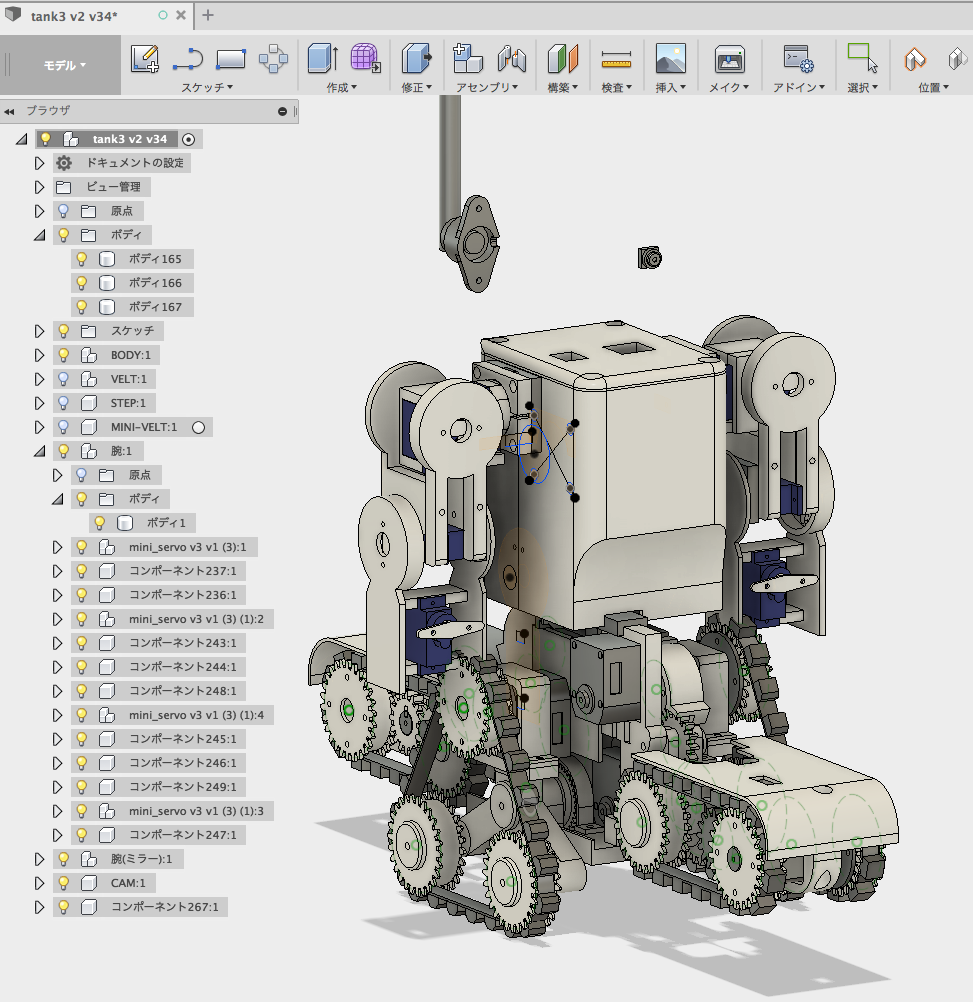
投稿日: 2018年4月19日 投稿者: junichiクローラーロボットの腕を構想 移動するだけでは、遠隔地のモニタリングなどの仕事しかできないので、アームの設計を始めました。 せっかくなので両腕をつけてみようと思います。 手先をどのようにするかは未定ですが、サーボを1つつけておけば、なんとかなるかな?