
XBeeを使った無線操縦の確認をしました。
屋外で20mほどの距離をコントロールしましたが、移動速度は遅いものの安定して動作しています。
ここをクリックで再生
arduinoで動作させました
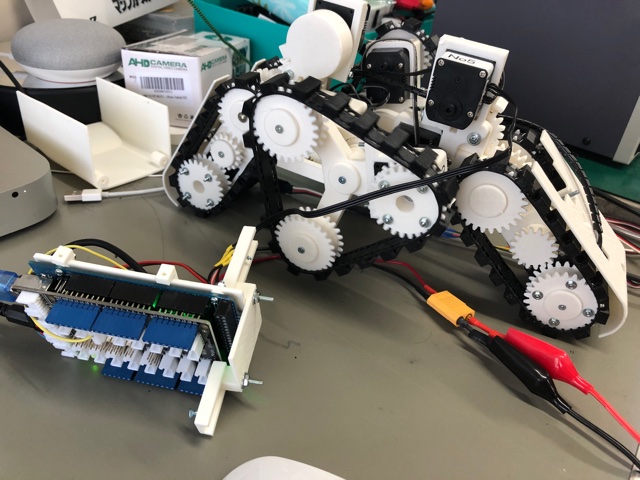
ICS基板を使ってarduinoでの動作を行いました。
これまではwindowsアプリからコントロールしてましたので、ケーブルで電力もコマンドも送ってましたが、arduinoを使うことでバッテリーを搭載しスタンドアロンで動作できるようになります。
階段昇降動作
階段を上り下りする動作を撮影しました。
実際のロボットの1/3スケールで製作しましたが、どうも階段に比べてサイズが小さかったようです。
もうちょっと大きくしないとスムーズに動作しないかもしれません。

動画はこちらをクリック
階段を製作しました。
クローラーロボットに前進・停止・後退・右旋回・左旋回の機能を持たせたので、実際の階段の1/3サイズの模型を製作し、登れるか挑戦してみました。

前後アームクローラーを使って階段を上ることができましたが、カバーが引っかかってしまうことと、リアクローラの組みつけが悪く過負荷気味なので改善が必要です。
バッテリーホルダの造形が終わりました。
実際に搭載して具合を確認してみます。
なかなか良い感じです。

カメラシステム
市販の2軸ジンバルの部品を使い、サーボを1軸追加して3軸ジンバルにしたカメラシステムです。

普通のNTSC信号で出力がくるので、映像のトランスミッタは自由につなぐことができます。
多カメラ対応なので複数個のカメラを搭載し、スイッチングして1つのカメラ映像を地上側に送ることができます。
GPSもあるのでカメラの緯度経度、高度などもXbeeを使ってデータ収集できます。
これは企業様向けに筐体を含めて弊社で設計製造したプロトタイプ品で、緯度経度情報を得て、googleMapに現在地を表示したり、カメラ映像をビデオキャプチャから表示するwindowsアプリも書いています。
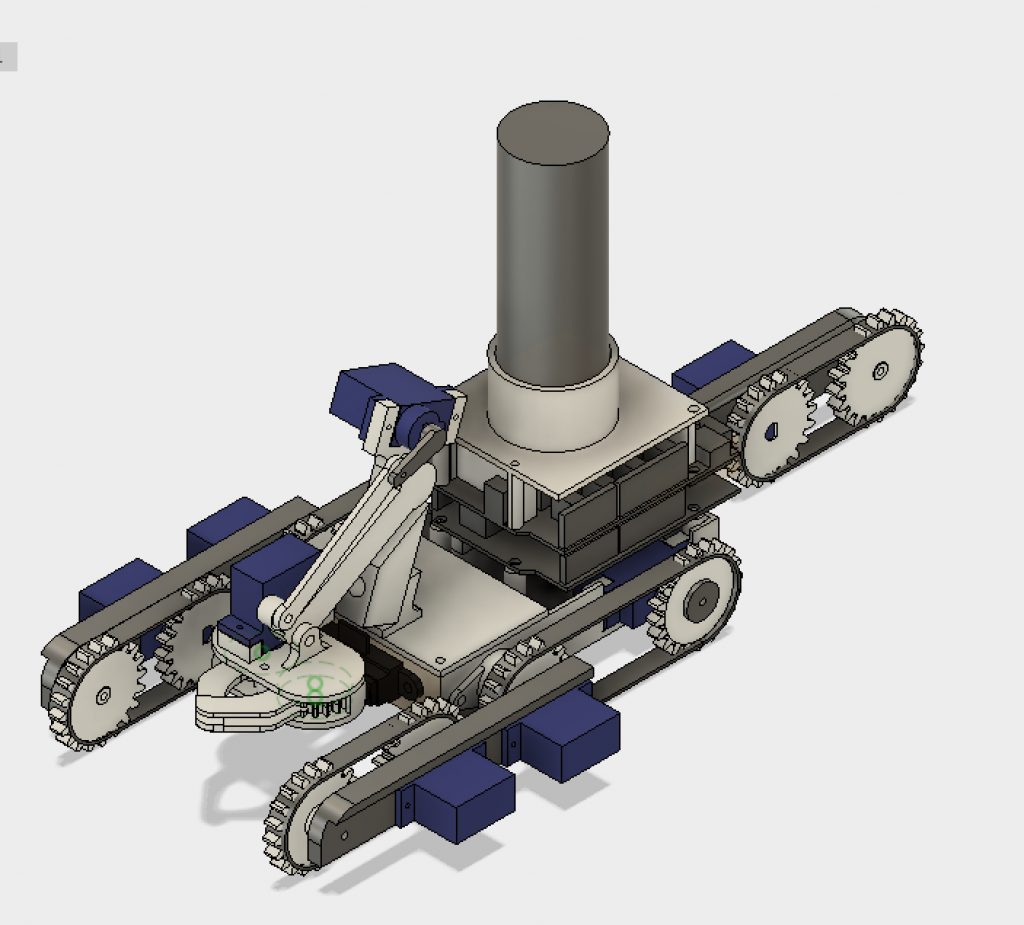
バッテリー駆動式に設計を変更
セミナーで使用するクローラーロボットの改良を続けています。
バッテリーで駆動できるようになると行動できる範囲が増えますので、搭載してみました。
安いモバイルバッテリーが円筒形型だったのでそれを載せられるようにベースを追加です。
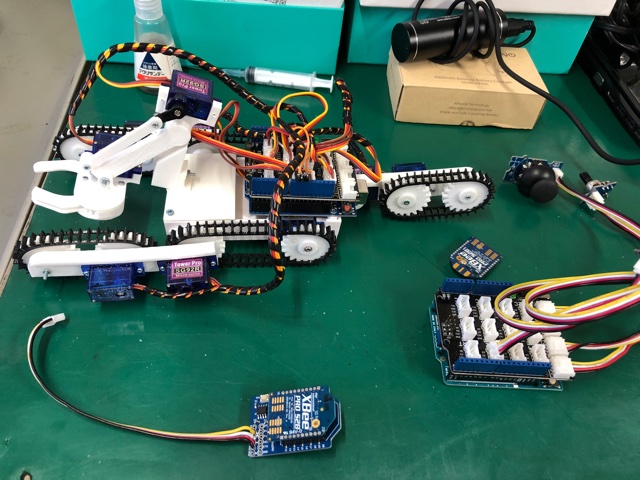
次のセミナーの準備をしています。
参加者にはセミナーの1回目でクローラーロボット(ミサイル発射バージョン)を製作していただきましたが、そのままではただのオモチャですので、災害対応ロボットでよくある形状の、アームクローラー付きのクローラーロボットを準備しています。
アームクローラーをつけることで、ロボットの最低地上高を稼いで障害物を乗り越えることができます。
また、ロボットアームもつけましたので、物を掴んで持ち上げることも可能です。
これをxbeeでリモートコントロールできるようにして参加者に学んでいただこうかと思いますが、シリアル通信やリングバッファなどの内容になるとちょと今回のセミナー回数では学習が難しいので、includeさせて使っていただきます。
3月31日の日経新聞にインタビュー記事が掲載されました。
先日、インタビューされた話が掲載されております。

震災と事故を受けたこの地域で、どのような形でロボットテスフィールドという地の利を生かした産業を創っていくかお話しました。
復興はお金や箱物ではなく人がいて初めて成し得ます。
そのためには若い人材の育成とその人たちが地元に根付く仕組みが必要だと思いました。
技術的なことは小さいうちから触れていないと素養が備わらず、良いものづくりは難しいと思います。
様々な経験がそのまま発想力につながりますので。
そのために、年齢を問わずものづくりに興味がある人たちが集えるような場所(カフェ)があればどうだろうかと思いました。
新しい事務所で活動を開始しました。
本日より新しい事務所で営業を行っております。
場所は、〒975-0075 原町区石神中居122の(株)栄製作所様の敷地内のプレハブになります。
休眠してたiMac24や必要な測定器、3Dプリンタなどを設置しました。

作業場所が広くなってとても快適です。

測定器や制作物などを置ける棚も準備していただきました。

心配なのは、弊社は不定休なので栄製作所様と就業日が重ならないことです。
たぶん、土日も普通に仕事をしていますので・・・。
その時は休日出勤扱いで届出を出すそうです。
サラリーマン時代に戻った感じですね。