Fusion360の機能を使って、CAMで部品製作をしています。
CNCフライスの良いところは、一度段取りをして動かせば後は放置でいいこと。
個人事業で色々と仕事を抱えているので助かります。
それもFusion360が無かったらここまでは出来なかったと思います。
自己流で使っているので、時間が取れたらFusion360のセミナーなどに参加してみたいです。

ロボット教育支援・パソコンサポート
Fusion360の機能を使って、CAMで部品製作をしています。
CNCフライスの良いところは、一度段取りをして動かせば後は放置でいいこと。
個人事業で色々と仕事を抱えているので助かります。
それもFusion360が無かったらここまでは出来なかったと思います。
自己流で使っているので、時間が取れたらFusion360のセミナーなどに参加してみたいです。
弊社が担当させていただいた南相馬ロボット評議会のロボット分科会の活動のセミナーが一定の評価を得まして、次回も行うことが決まりました。
しかし、1回目でやりたい事を詰め込みすぎたのと、災害対策用ロボットを想定したミニクローラーロボットは部品点数も制御機器も多く、小さい割に高価でした。
そこで、1万円程度に収まる様な安価なロボットを設計してみました。
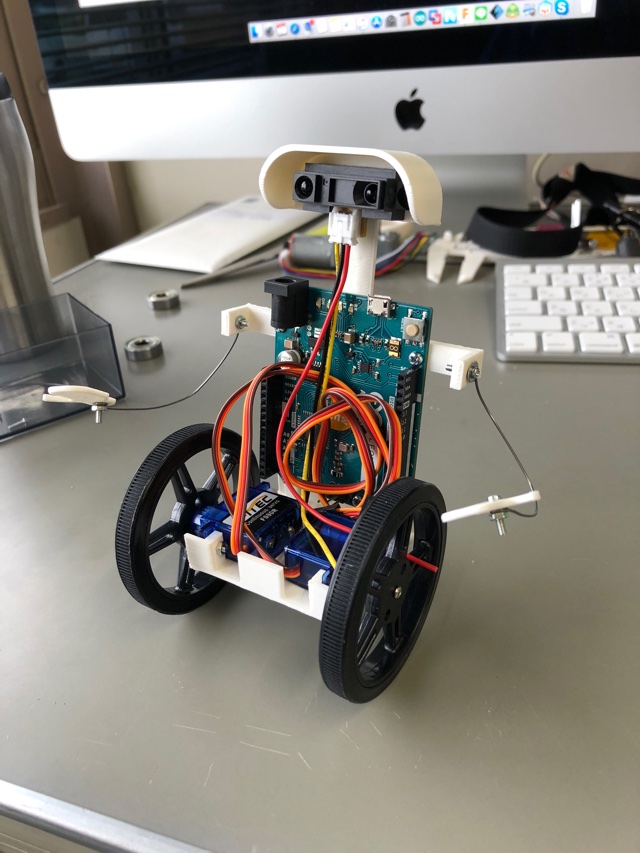
3Dプリンタで造形する部品点数をわずか5個にして、製作時間も3時間以内に抑えました。
(前回は20時間くらいかかり、部品点数も20個以上ありました)
モーターも2個と前回の8個から大幅減です。
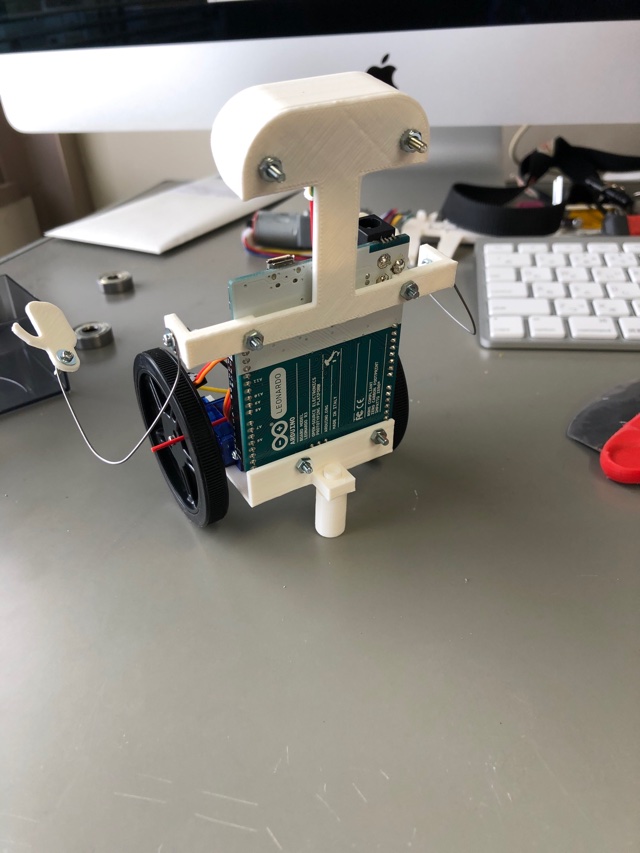
そのための工夫としてarduinoの基盤をボディの一部として使いました。
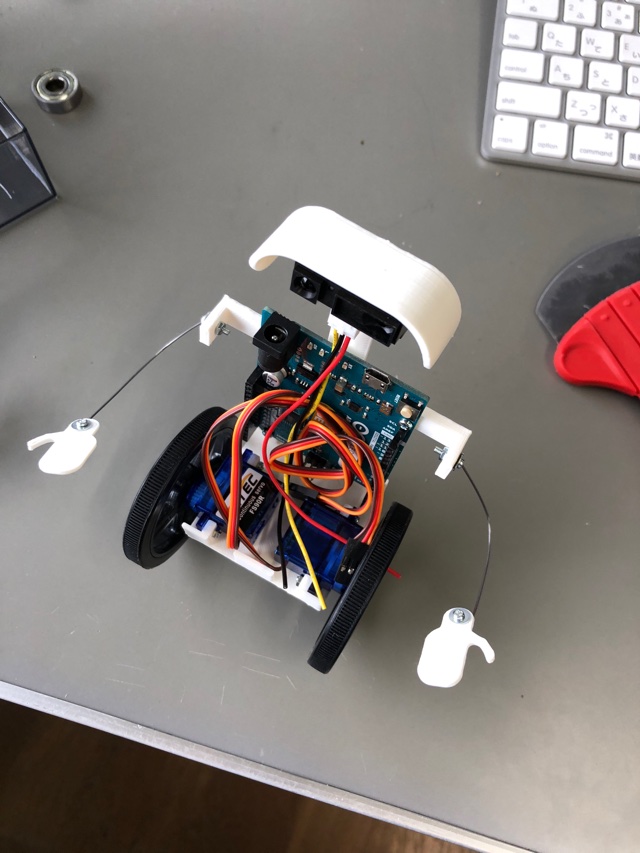
腕も動作させません。針金で「手」だけ造形してあります。

カバーはコピー用紙で両面テープで貼り付けてます。
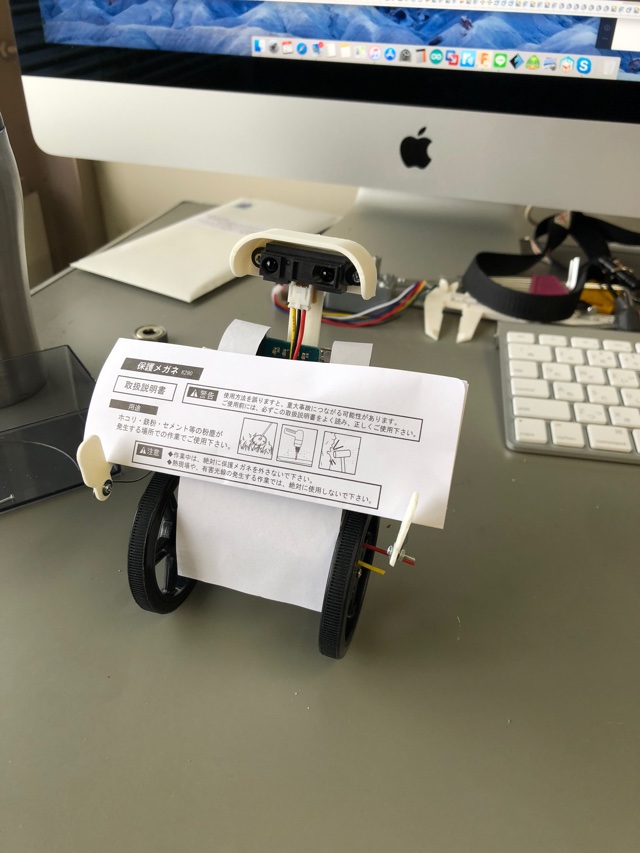
腕が針金なので、このように軽いものを持たせることもできます。
顔に見える部分は、距離センサーになってます。
2ndシーズンの構想としては、からくりロボットの茶運び人形のように、前進して距離センサーで障害物を見つけたら180度反転して戻ってきて、顔の前に手をかざすと停止するという動作を参加者の皆さんに学んでいただこうかとおもいます。
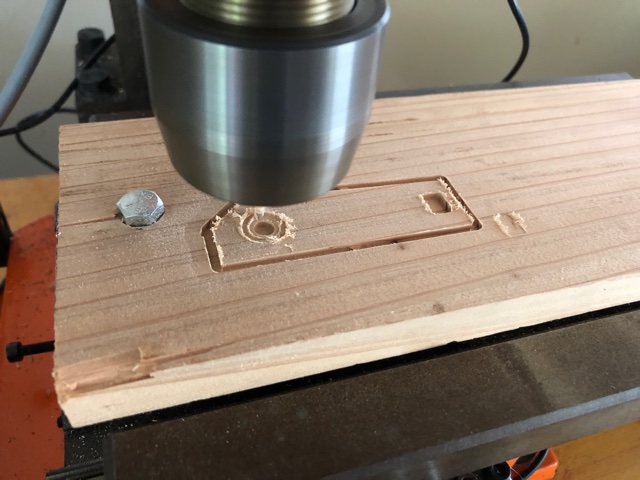
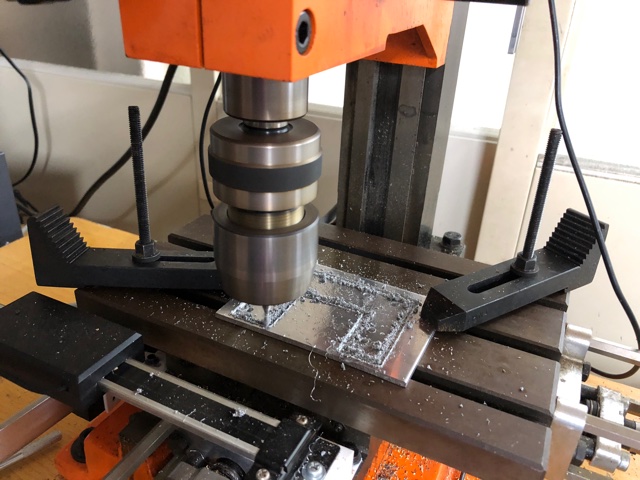
エンドミルを折らない様に木材でテスト切削をしてみました。
切り込みに対する移動量の設定がよくわかっていないので、これから調整してみます。

バッテリーをリポに、本体の制御も改良しました。
地元のお祭りなどで使うかもしれません。
時間が取れたため、Fusion360を使ったCAMの確認作業をしています。
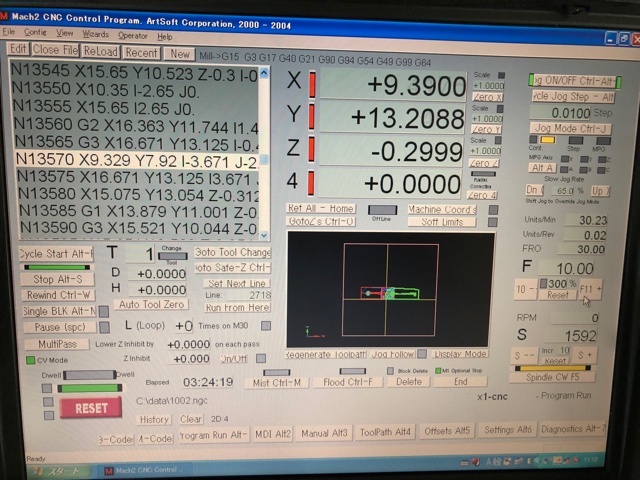
弊社卓上NCフライスはWindowsXPとMACH2の組み合わせという古い組み合わせですが、CAMに関しては1年ほど前にFusion360で軽く動作試験を行ったのみだったので、その復習もかねて作業してみました。
Fusion360のCAMにはプロファイルとしてMach2Millがあるのでそれを使いましたが、加工途中でエラーで止まるため別なプロファイルを利用しました。
次は、切り込みがなぜか全体的に0.5mmほど浅く設定されるため高さ設定でボトムの高さを-0.5mm調整し、現在動作確認を行っております。
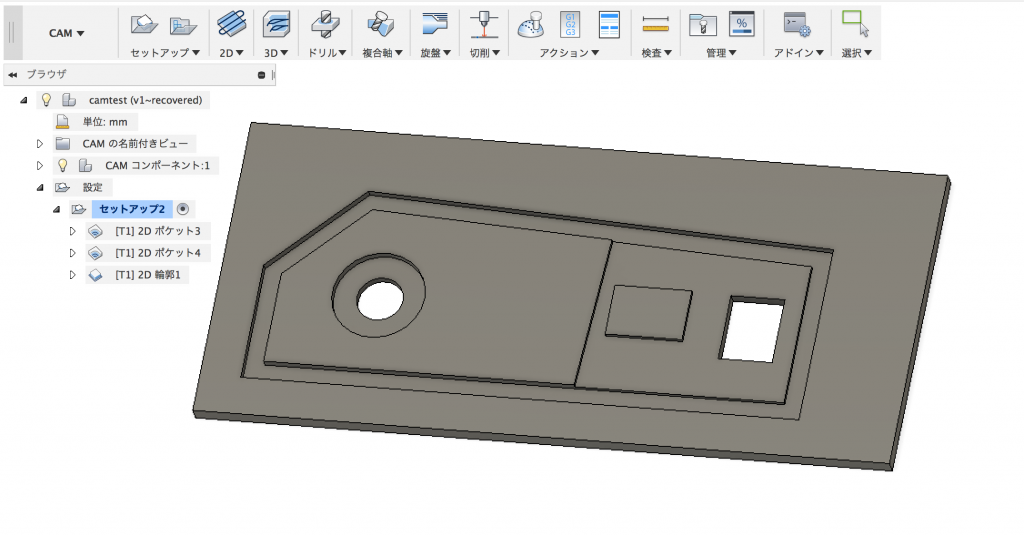
このような感じで板を切る出すようなモデルを作成しました。
うまく使いこなせればアルミなどを切り抜いてロボットの部品も作成できると思います。
 不在かどうかわかりづらいので、事務所の入り口に看板をつけました。
不在かどうかわかりづらいので、事務所の入り口に看板をつけました。
この場所は間借りしているので、工場の人も作業にくるのですが鍵が開いているかどうかわかりづらいと思い、看板を掲げることにしました。
この看板が出ているときは事務所内におります。
ない場合には施錠と警備をセットして外出中です。