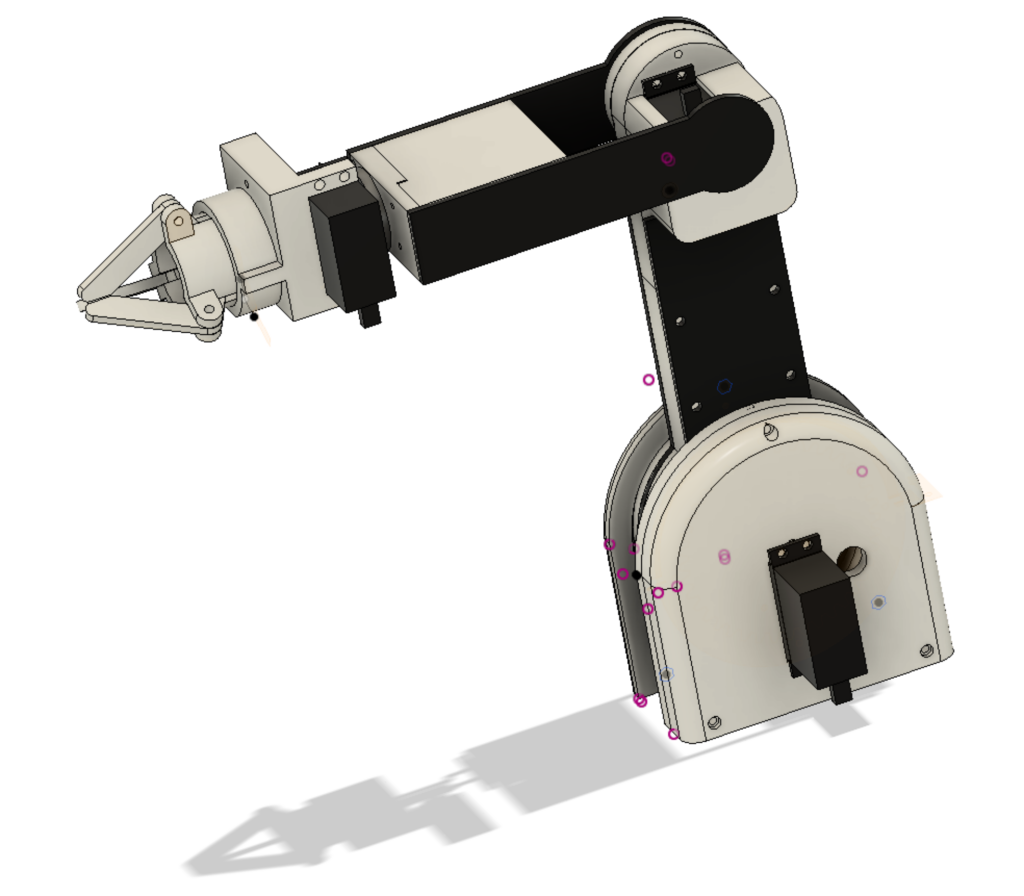
地元高校で技術指導を行う依頼があり、そこで使うロボットアームを構想しました。
【メカ的なコンセプト】
・肩部分は減速機を使い、大きいモーメント荷重に耐えられるとともに減速機の仕組みを理解してもらう。
・ハンド部分は3つ爪を使用し、リンク機構の理解をしてもらう。
・指先やアーム長などは3Dプリンタ用データを提供することで自由に改造できるようにする。
【制御的なコンセプト】
・現状のクローラロボットに載せるだけで使えるように分離した制御を行う。
・多軸の面倒な制御を簡単に操作するUIを学ぶ。
・arduinoの使い方を覚える。
このような感じで考えております。
問題は費用かなぁ。
大きいものを造形するのに材料も時間もかかること、試作を数回行って問題点を出して形状の改善を行うことから多少お高いです。
とはいえ、設計・加工・組立・調整・制御まで入っているのでものすごく高いというわけではないのですが・・・。