MISORAを開発する場合、デバック中に本体を壊す可能性があるような動作(段差超えなど)は、MISORA miniを使ってプログラムを作成し、MISORAに移植する方法をとっています。
これにより、狭いフィールドでも効率的に大きいロボットの動作検証を先行して行うことができます。
これは、MISORA miniが段差を乗り越える動画になります。
こうしてプログラムの検証を重ねています。

ロボット教育支援・パソコンサポート
MISORAを開発する場合、デバック中に本体を壊す可能性があるような動作(段差超えなど)は、MISORA miniを使ってプログラムを作成し、MISORAに移植する方法をとっています。
これにより、狭いフィールドでも効率的に大きいロボットの動作検証を先行して行うことができます。
これは、MISORA miniが段差を乗り越える動画になります。
こうしてプログラムの検証を重ねています。
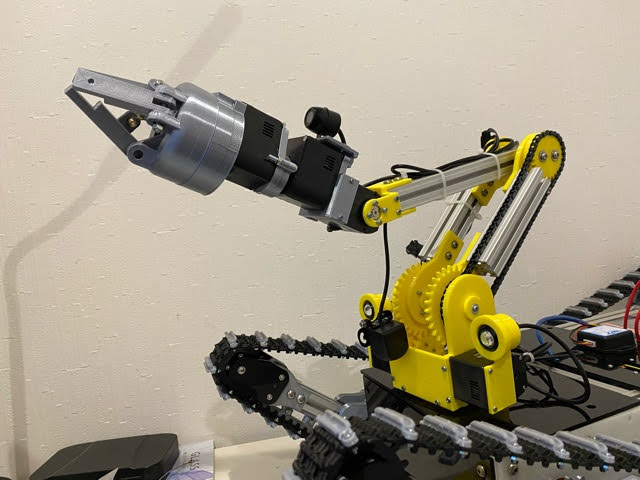
MISORAのハンドは着脱式ですが、可動制御できるハンドがありませんでした。
そこで、MISORA miniを使って電動ハンドの設計・製造・動作確認をおこなってみました。
ネジの推力で指を開閉するので、把持力は小さくても5kg以上あると思います。
これを元に、MISORAサイズのハンドを菊池製作所殿に作ってもらう予定です。