MISORAにはMISORI(Master Input Slave Output Robot Interface)というコンローラを自作して使用しているのですが、今回、それをさらに進化させたMISORI-2というコントローラを製作しました。
従来よりも大きくなりましたが、その分、これまで以上に高機能でなおかつ拡張性が向上しています。
WRSにはこのコントローラで挑みます。


ロボット教育支援・パソコンサポート
MISORAにはMISORI(Master Input Slave Output Robot Interface)というコンローラを自作して使用しているのですが、今回、それをさらに進化させたMISORI-2というコントローラを製作しました。
従来よりも大きくなりましたが、その分、これまで以上に高機能でなおかつ拡張性が向上しています。
WRSにはこのコントローラで挑みます。
会津大学様の相双地域向けIT教育授業で弊社がArduinoの授業を受け持つことになりました。
単にLEDやブザーを光らせたり鳴らしても面白くないので、戦うロボットを制御することにしました。
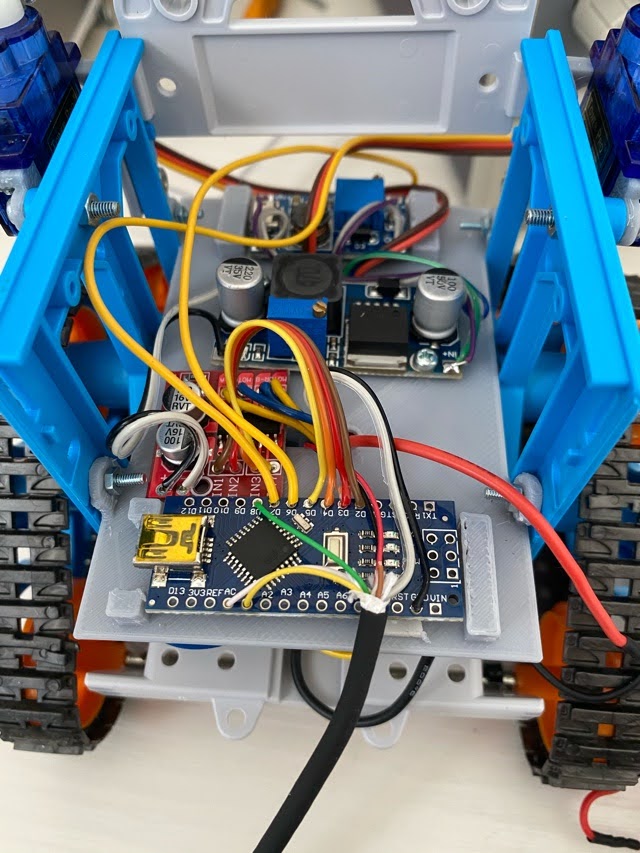
ベースはタミヤのクローラロボットで、それにモータドライバとサーボモータとarduino nanoを搭載してジョイスティックで制御できるようにしました。
右の腕には全ての敵を薙ぎ倒す「トシタネブレード」を、左手には全ての攻撃を跳ね返すシールドを持っています。
頭には、相馬藩の旗指物がつけられるようになっていて、これを弾き飛ばされた方が負けになります。
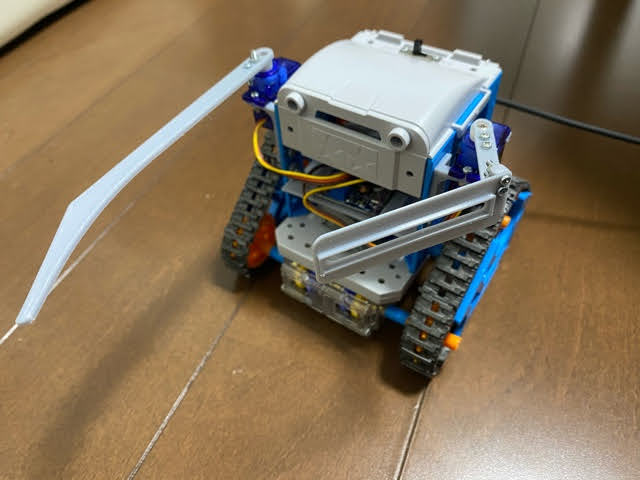
こんな感じのロボットを5台製作し、みんなで制御の学習を行ってみようとおもいます。
動作はこんな感じです。
トシタネブレードを振り回すキバムシャーン