
このページではクローラーロボットの組み立て方法を説明します。
■使用工具
・プラスドライバ(細いもの)
・ラジオペンチ
■組み立て手順
【事前作業】
駆動用のサーボモーターは軸を周りどめ加工をしなければなりません。
駆動用の歯車はD型に穴が空いてますので、それに合わせて軸を”平取り”します。
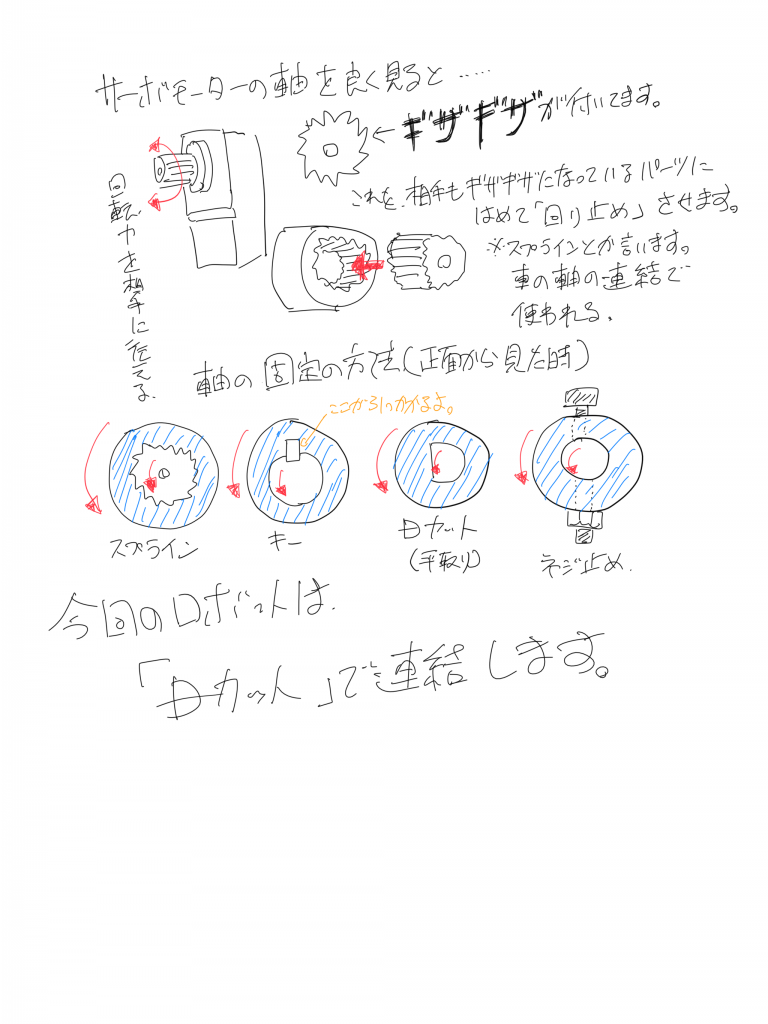
■Dカットの方法
必要なもの:カッターナイフ
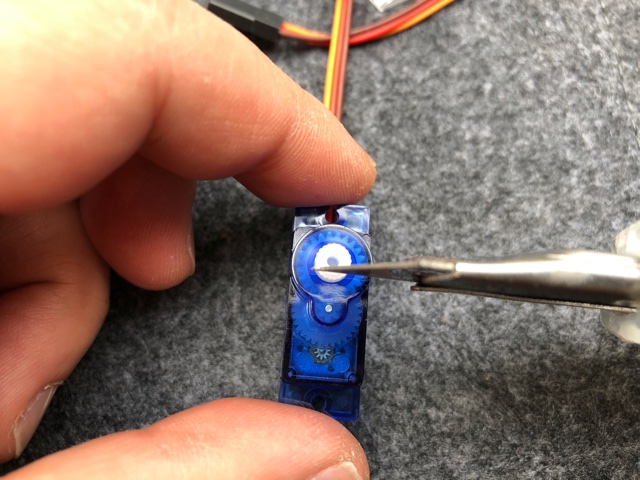
1.差し込む歯車を確認しながらカッターナイフをサーボの軸に当てて押していきます。
一度に切り取る部分を大きく取ると、切りすぎた時に元に戻せないので少しづつ切って、歯車に差し込んで確認してください。
カッターの刃を切り込む方向に指をおかないように気をつけてください。
2.今度は軸方向から切り込んでいきます。1.の切り込みがちゃんと根元まで届いていれば、パキッという音とともに軽い力で切り込んだところが取れます。
取れたら、歯車に差し込んで確認してください。
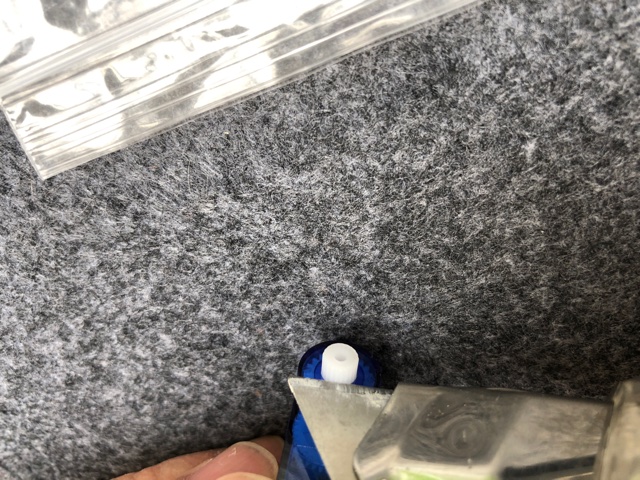
お互いが樹脂の部品ですので、少し力を入れれば入るはずです。
入らなければまた1.からやり直してください。
■組み立て手順
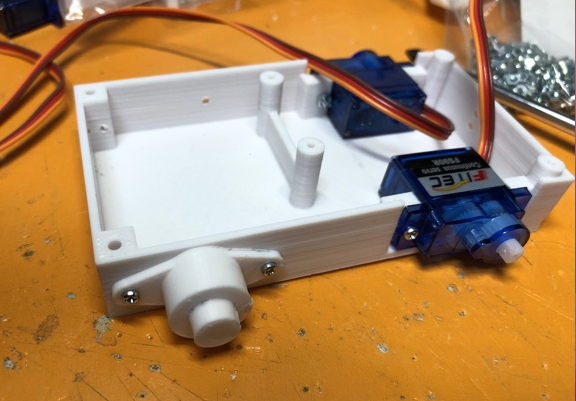
1)ボディにサーボモータ2つを写真のように取り付けます。
その後、M2-10ネジ2本とナットで固定します。
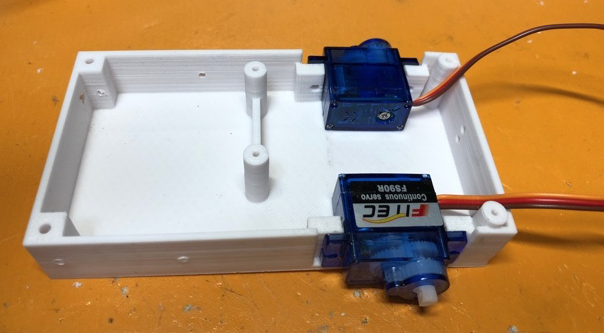
2)ホイールアダプタを2つ取り付けます。
左側はM2-15、右側はM2-8のネジでナットで固定します。(反対側は逆になります)
3)左右のサーボモータにギアを取り付けます。
片側づつ取り付けて、キャップをつけた皿ネジ2-6で固定してください。
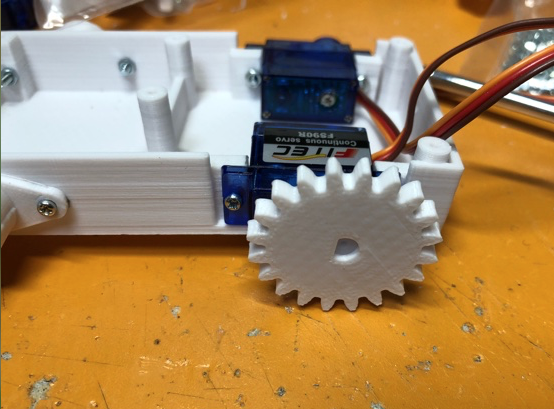
(樹脂にタッピングネジを固定するときは、締めすぎないように軽く固定するように締めてください)

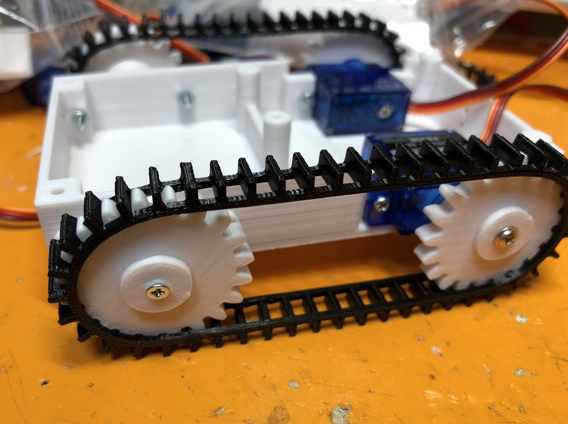
4)クローラーベルトをギアにかけて、反対側にホイールをかけます。
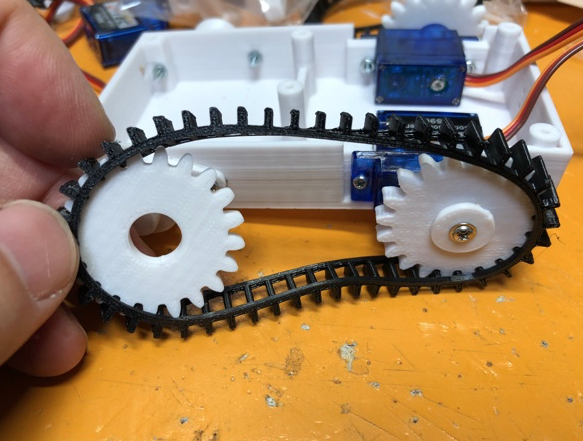
5)ホイールアダプタにホイールを差し込みます。差し込んだ後にギアと同じようにキャップをつけた皿ネジ2-6で固定してください。
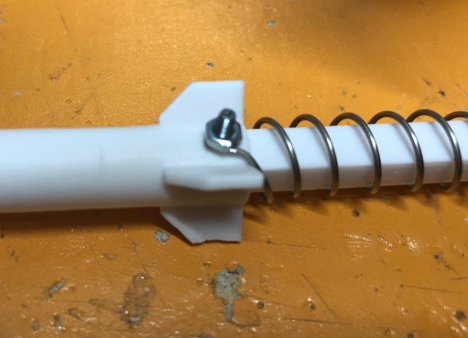
6)ミサイルを組み立てます。
ミサイル本体にミサイルアームを差し込みます。その後スプリングを取り付けます。
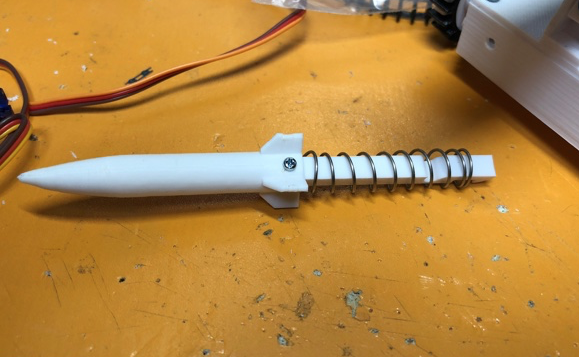
7)スプリングの端をミサイル本体とミサイルアームを固定しているネジM2-15とナットに挟んで固定します。(締めすぎないように)
8)ミサイルドグプレートを組み立てます。付属のサーボホーンが写真のように丸い切り欠きの中央に来るように位置決めします。

9)ミサイルドグプレートにサーボホーンを2本の皿ネジ2-4で固定します。

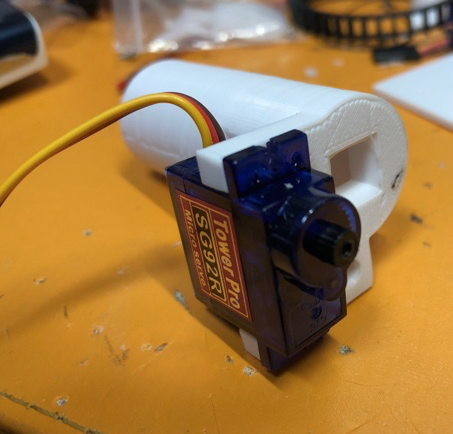
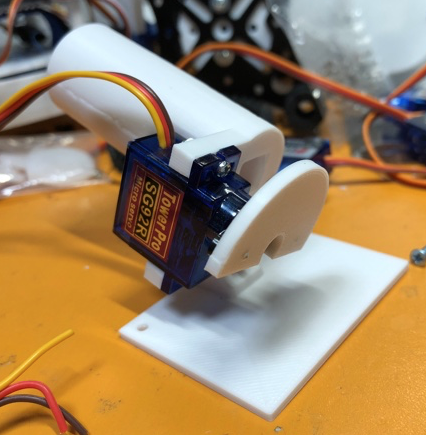
10)ミサイルホルダにミサイルサーボを2本のM2-10とナットで取り付けます。ミサイルサーボの方向に注意してください。
11)ミサイルホルダをミサイルベースに取り付けます。M2.5-15と座金、ナットで固定します。

12)ミサイルサーボに組み立てたミサイルドグプレートを皿ネジ2-6で軽く固定します。(あとで調整しますので締めないでください)
13)ボディにArduinoを4本の皿ネジ2.5-8で取り付けます。ミサイルベースも2本の皿ネジ2.5-8で軽く固定します。
(ミサイルベースは後で調整の時に取り外します)
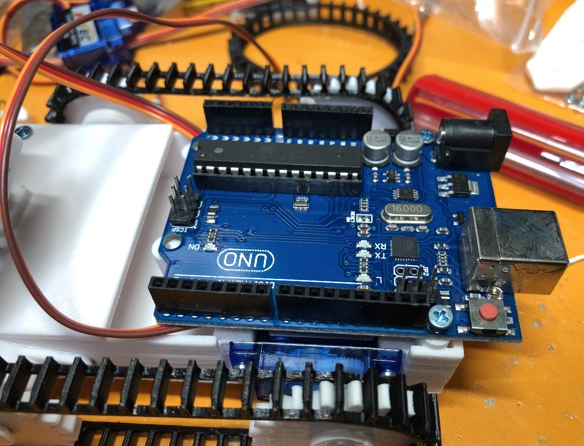
14)ArduinoにGROVEベースボードを取り付けます。
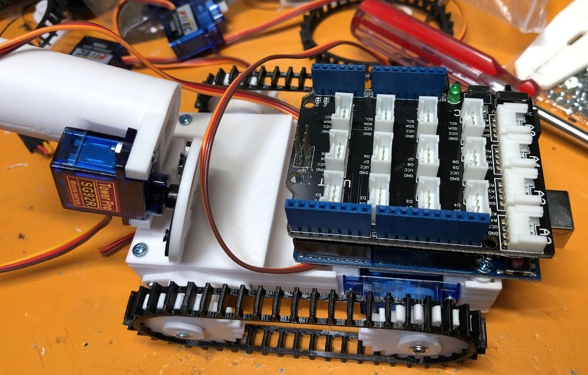
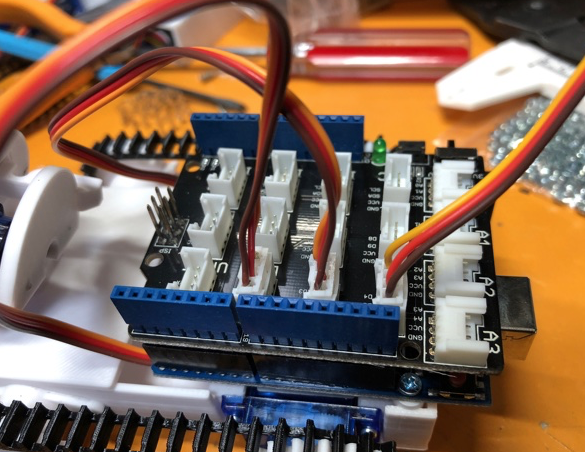
15)配線をします。最初に左側のサーボモーターのケーブルをGROVEベースボードのD2コネクタに取り付けます。
次に右側のサーボモーターのケーブルをD3へ、ミサイルサーボのケーブルをD4に取り付けます。
※コネクタには向きがありますので、写真を見ながら間違わないように注意してください。
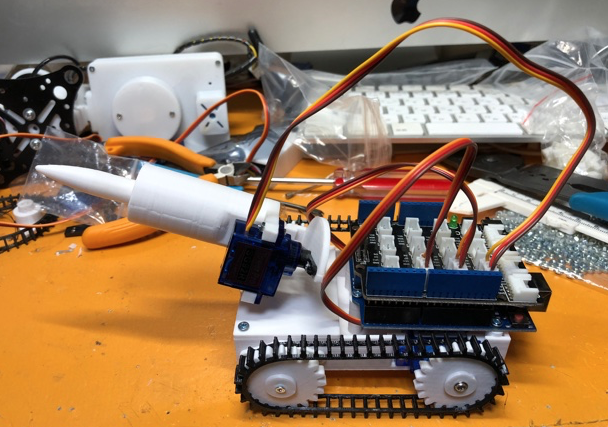
16)ここまで組み立てると写真のようになります。
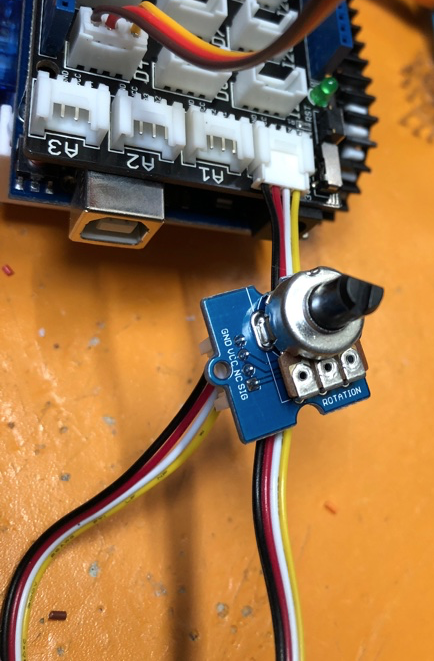
17)前進・後退ボリュームをGROVEベースボードのA0コネクタに取り付けます。
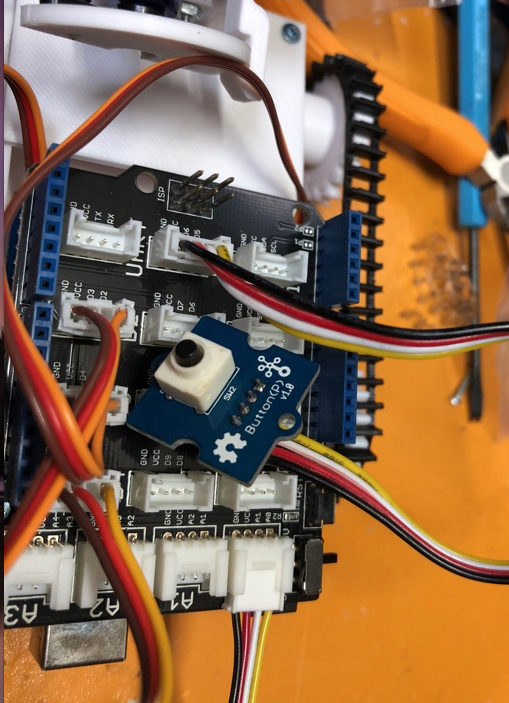
18)ミサイル発射スイッチをGROVEベースボードのD5コネクタに取り付けます。
以上で組み立て完了です。お疲れ様でした。
出来上がったロボットから順にプログラムをこちらで書き込むので持ってきてください。