実際にモーターの配線を始めると、駆動ギヤにケーブルが巻き込まれないように取り回しを検討しなければなりません。
制御盤の様に配線が動かない場合には設計段階からケーブルの取り回しを構想できますが、ロボットのように動くものの場合はケーブルの剛性やたわみ具合により試作をして実機で確認した方がいい感じで取り回せると思います。
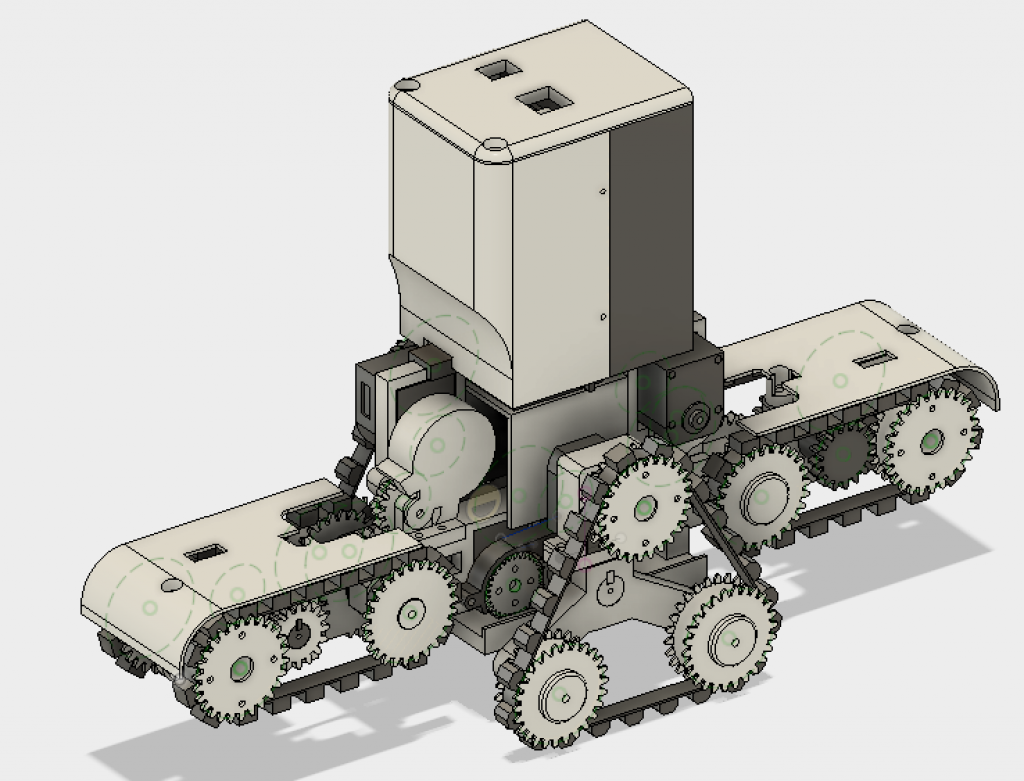
現時点で試作したロボットの配線を行い、使用するマイコンボードを搭載してケーブルの取り回しを考えつつカバーの設計を行いました。
カバーがつくとロボットらしくなりますね。

ロボット教育支援・パソコンサポート
実際にモーターの配線を始めると、駆動ギヤにケーブルが巻き込まれないように取り回しを検討しなければなりません。
制御盤の様に配線が動かない場合には設計段階からケーブルの取り回しを構想できますが、ロボットのように動くものの場合はケーブルの剛性やたわみ具合により試作をして実機で確認した方がいい感じで取り回せると思います。
現時点で試作したロボットの配線を行い、使用するマイコンボードを搭載してケーブルの取り回しを考えつつカバーの設計を行いました。
カバーがつくとロボットらしくなりますね。