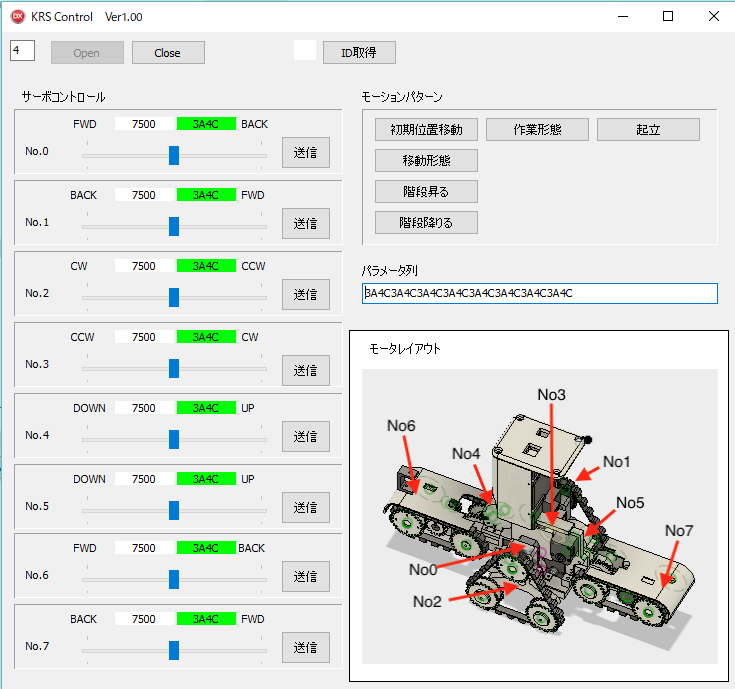
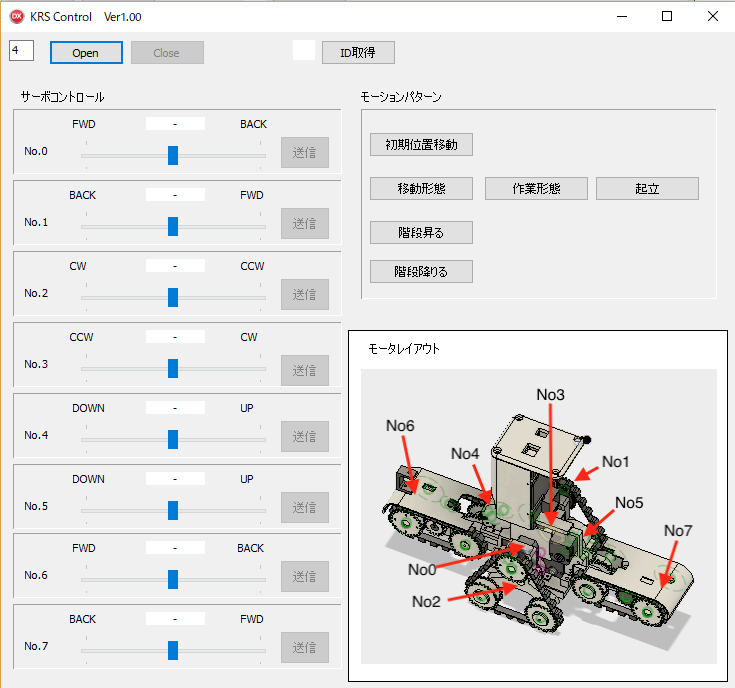
ロボットのモーションコントロール用のアプリができました。
各軸のスライダをいじって姿勢を決めて、それをボタンに割り付けて姿勢をコントロールさせようかと思います。
使ううちに仕様を変更したり拡張したくなりますが、サーボに渡す数値をパラメーター列として取得したかったので対応しました。
8軸分のパラメータ文字列ができますので、それをプログラム内に貼り付け、分解して転送する機能を実装すると、モーション割り当てボタンをクリックするだけで再現できると思います。
本来なら、ボタンよりもリストで連携させた方がユーザーレベルでも使えるツールになるのですが、市販の予定もないツールなのでプログラムに直接埋め込んでいきます。