
弊社が担当させていただいた南相馬ロボット評議会のロボット分科会の活動のセミナーが一定の評価を得まして、次回も行うことが決まりました。
しかし、1回目でやりたい事を詰め込みすぎたのと、災害対策用ロボットを想定したミニクローラーロボットは部品点数も制御機器も多く、小さい割に高価でした。
そこで、1万円程度に収まる様な安価なロボットを設計してみました。
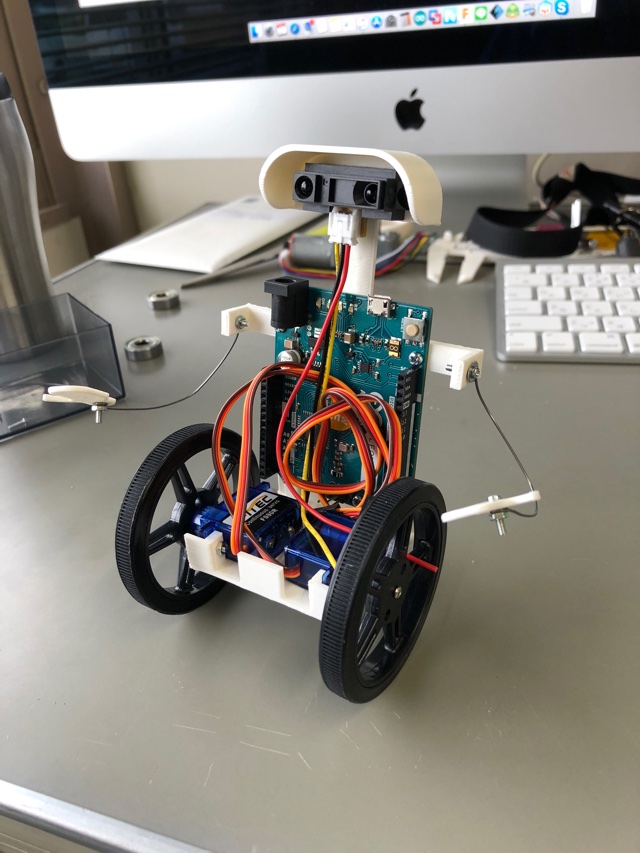
3Dプリンタで造形する部品点数をわずか5個にして、製作時間も3時間以内に抑えました。
(前回は20時間くらいかかり、部品点数も20個以上ありました)
モーターも2個と前回の8個から大幅減です。
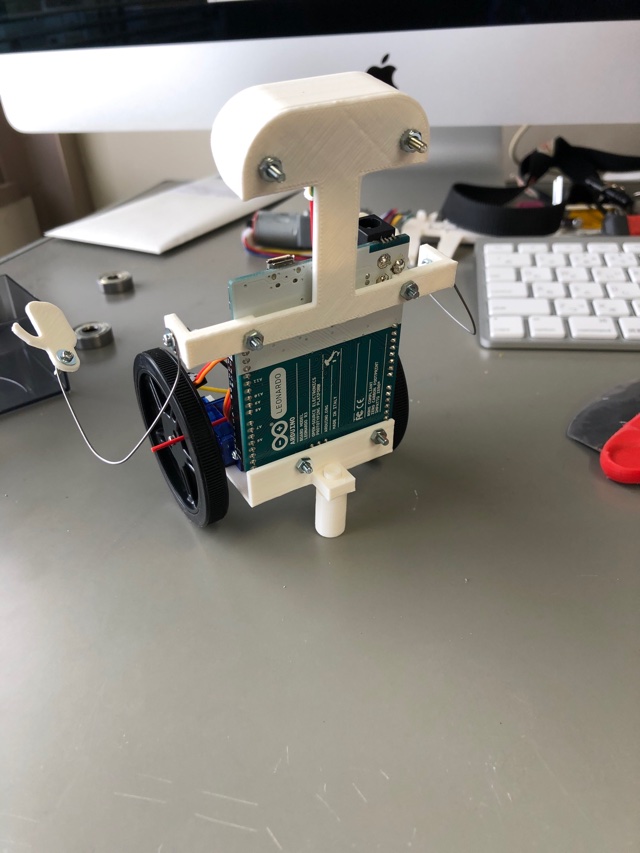
そのための工夫としてarduinoの基盤をボディの一部として使いました。
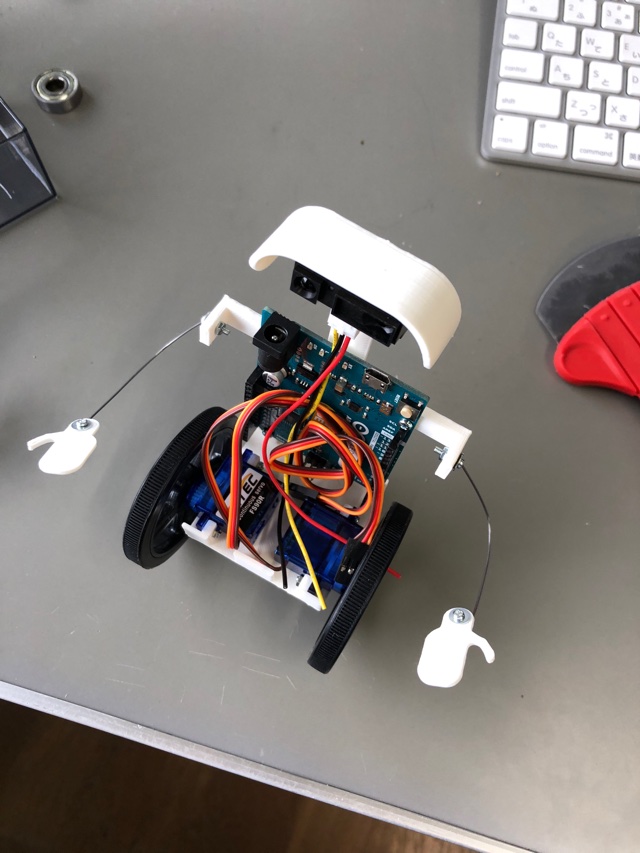
腕も動作させません。針金で「手」だけ造形してあります。

カバーはコピー用紙で両面テープで貼り付けてます。
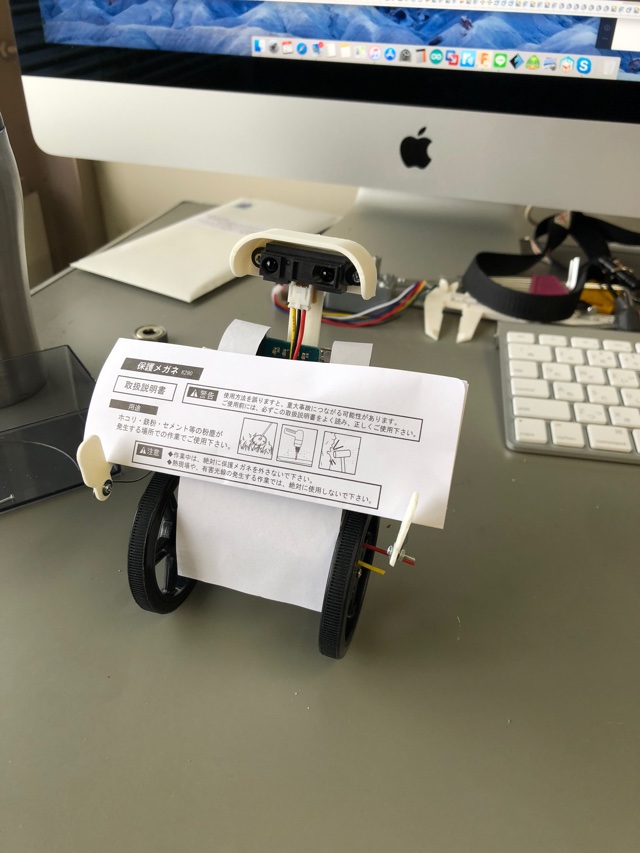
腕が針金なので、このように軽いものを持たせることもできます。
顔に見える部分は、距離センサーになってます。
2ndシーズンの構想としては、からくりロボットの茶運び人形のように、前進して距離センサーで障害物を見つけたら180度反転して戻ってきて、顔の前に手をかざすと停止するという動作を参加者の皆さんに学んでいただこうかとおもいます。