南相馬市には、ロボットテストフィールドという場所が作られ、各種ロボットの動作試験をより現実的なシュチュエーションで実験できるようになる予定です。
そこで試験を行ったり検証を行うだけでは、地元企業が潤うことはなく恩恵を直接受けることができません。
私は南相馬ロボット評議会の分科会であるロボット研究会の副理事なのですが、昨日、役員会があり出席しました。
そこでロボットを作る話になった時に、会員から「部品の入手が難しい。通常の産業機械とは違うニーズの製品を探すのが大変だし、あっても海外のものとかで容易に入手できない」という話が出ました。
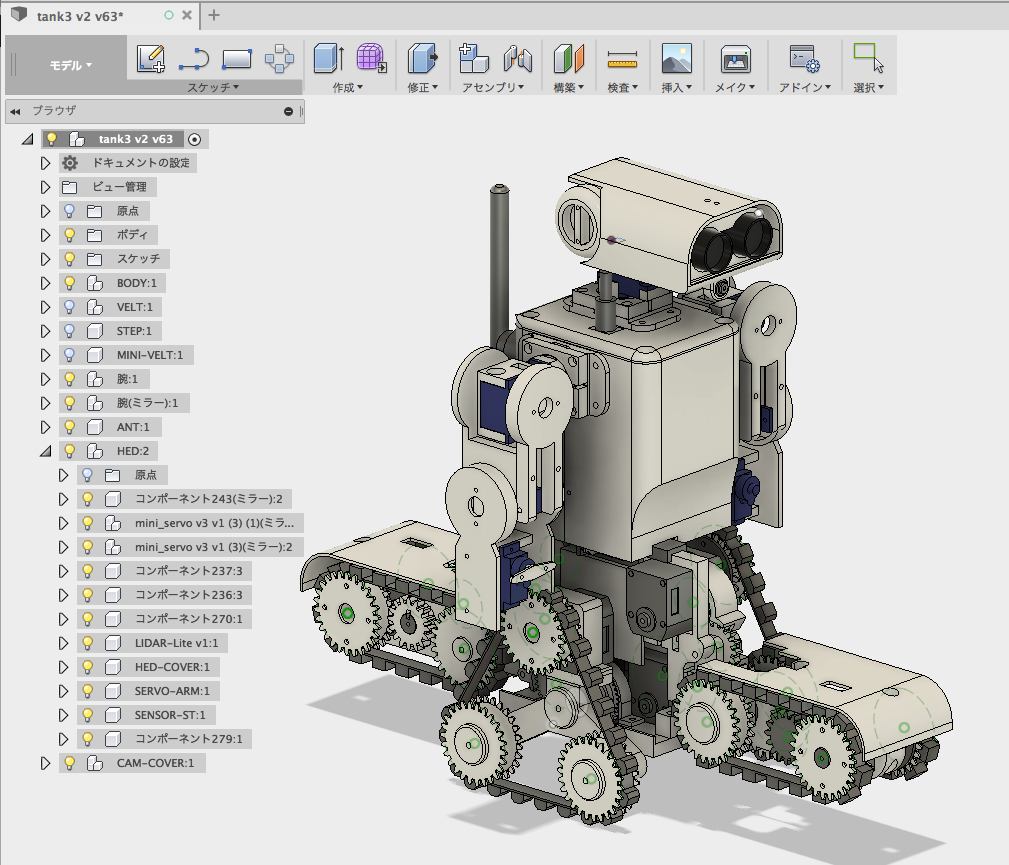
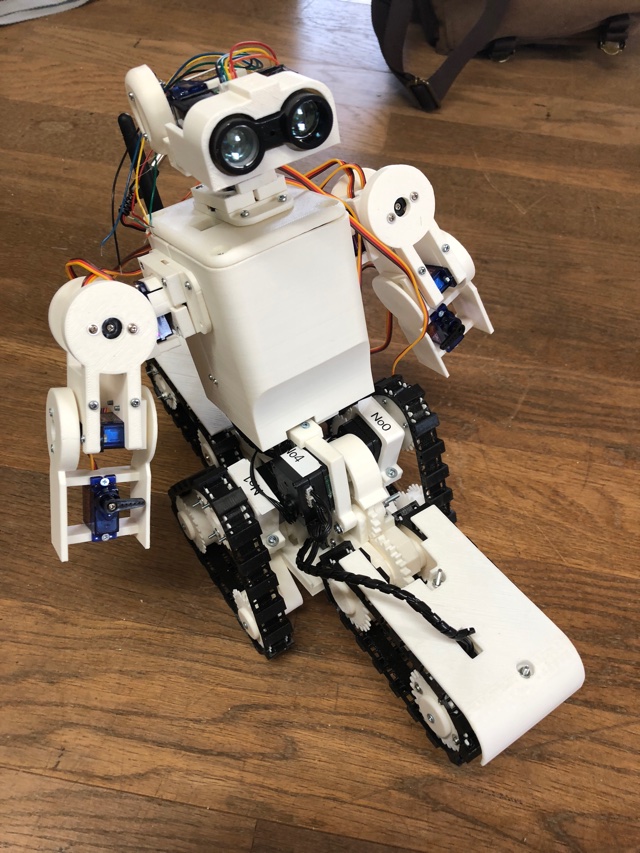
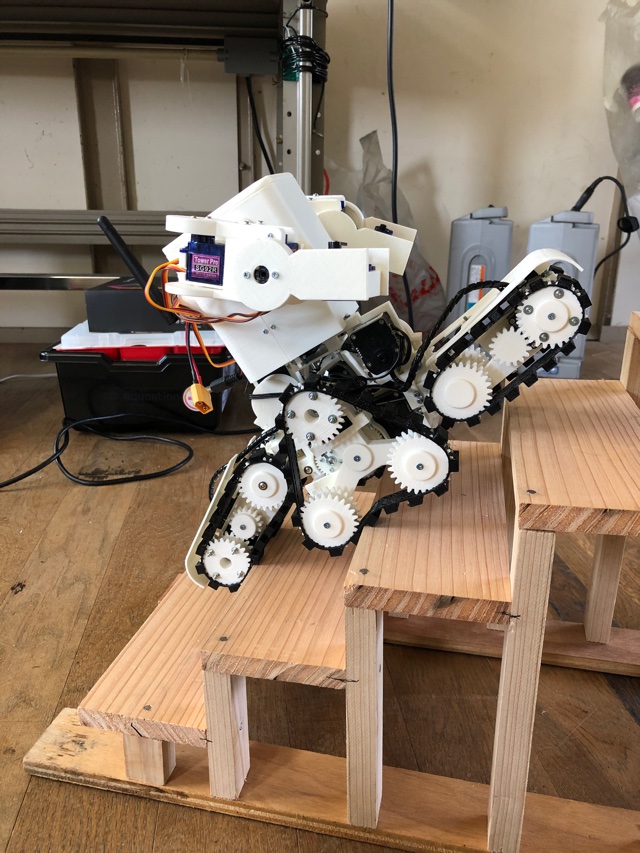
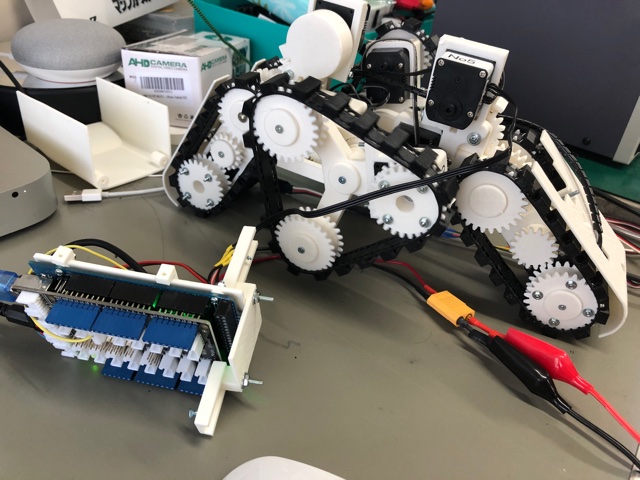
まったくその通りで、例えばクローラーロボットのベルト1本でも任意の寸法のものを入手するのはまず無理で、市販のもので似通ったものを選んでくるのが関の山です。
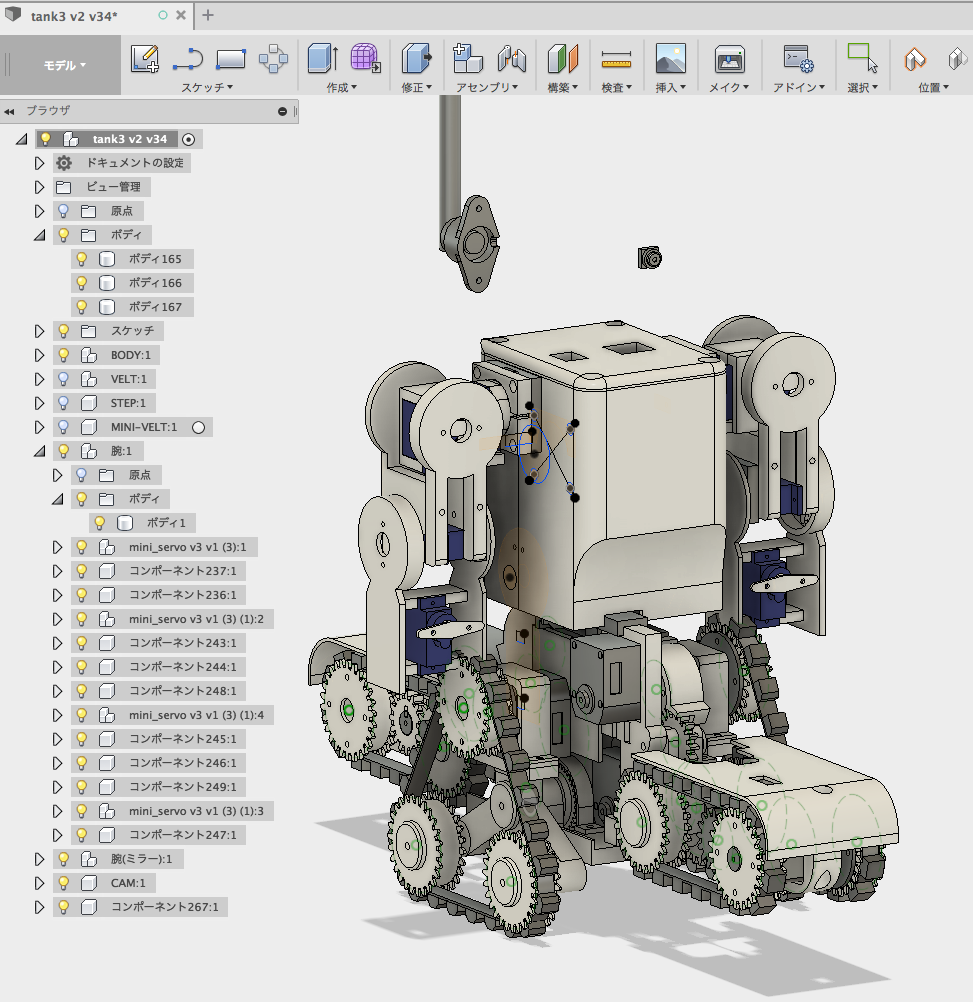
そのときふと思ったのですが、今後、いろいろなロボット産業が立ちあがってきたときに、主要なモーターやドライバなどは大手が製造を行うとして、その周辺のまさにクローラベルトやギヤボックス、リンク機構などを地元企業で製品化し、会津大学と産総研で推進しているロボットミドルウエアで使えるモジュールをそのまま使えるようになるとニッチな市場である程度、産業化できないかなと。
今でもマイクロハンドなどのレベルなら県内企業で生産しているものもありますが、どれも単発的なモジュールである場合が多く、体系的なロボットモジュール製造をしているところは国内でそうないのかなと思いました。