昨日は、南相馬市にある放射線対策センターの一室でロボットのセミナーをおこないました。
2回目の講義になり、arduinoを使った言語の学習になります。
なにぶん、初めてセミナーを開催していることと、受講者もまったく制御経験のない方々なので質問の内容も
・エディタの文字に色がついているが、どういう意味か?
・文の最後に「;」がついているけどどういうことか?
・命令語の前に空白を書いたらエラーになった(たぶん全角かな?)
こんなことから始まります。
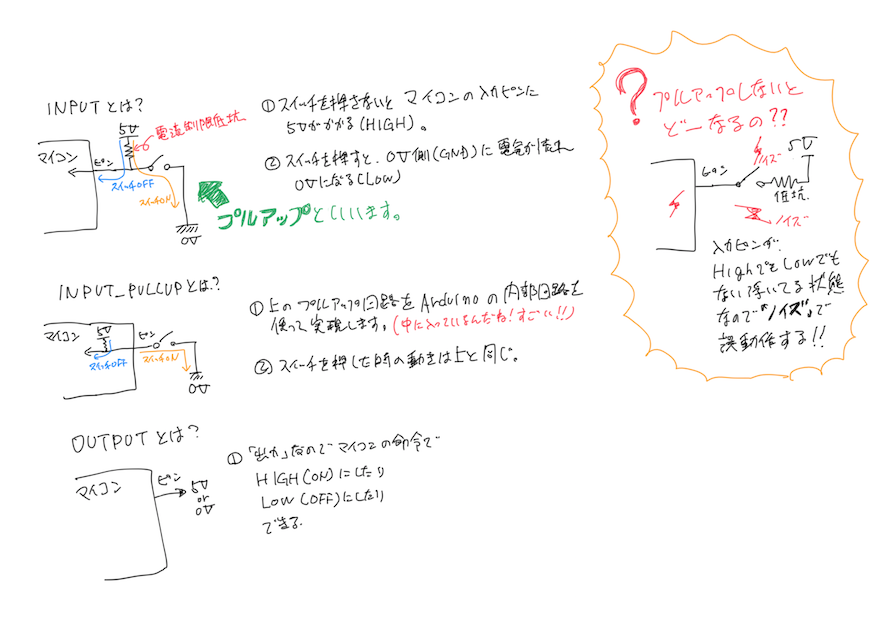
しかも受講する内容が、信号入力をプルアップする意味とか、constを使ってマジックナンバーを避けて定数も名前で管理しましょうとか、そんな感じから始まり、10進数の1000を2進数表記するとこんな感じ・・・とビットの説明を受けたりと時間が進むにつれて、お通夜会場のような雰囲気になっていきます。
どうやったら、興味を持って飽きずにやってもらえるか。
どんなセミナーでもこれが課題なのでしょうけどね。
今回で4回行ったセミナーですが、同じ内容を火曜日と土曜日に1回づつなのでまだ2回目の内容になります。
しかも、最初に行う火曜日の問題点(説明が難しかった部分とか、補足すべき内容があったとか)は土曜日のセミナーで潰して行っているので、進捗も変わってしまうという・・・。
しかし、2回目のセミナーを終えて、座学でも実際に配線をいじって動かして・・・とやった方が理解が早い気がします。
なので3回目以降は、演習を行うような感じに振って内容を組み立てたいと思います。