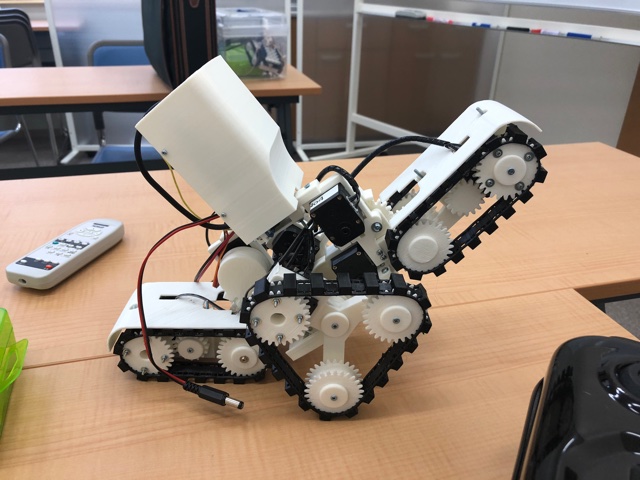
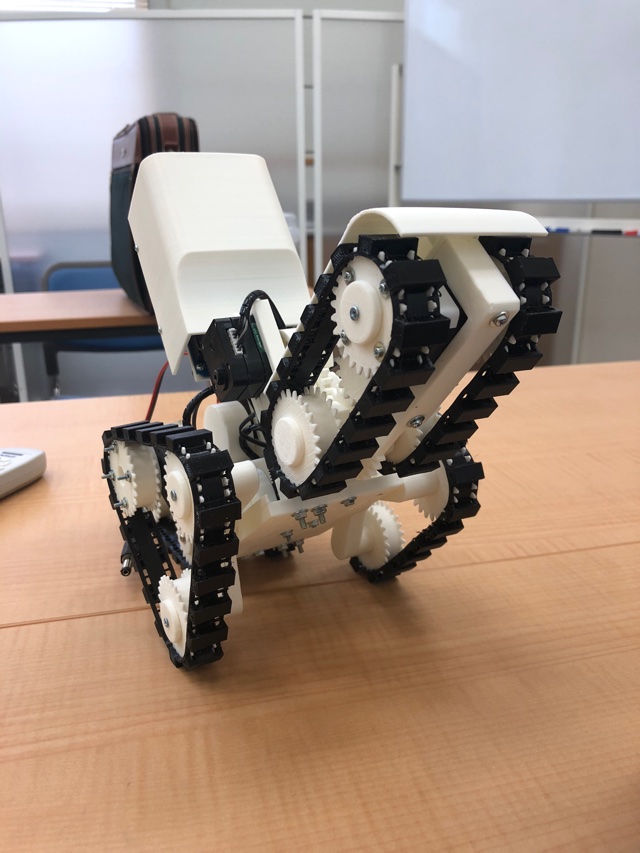
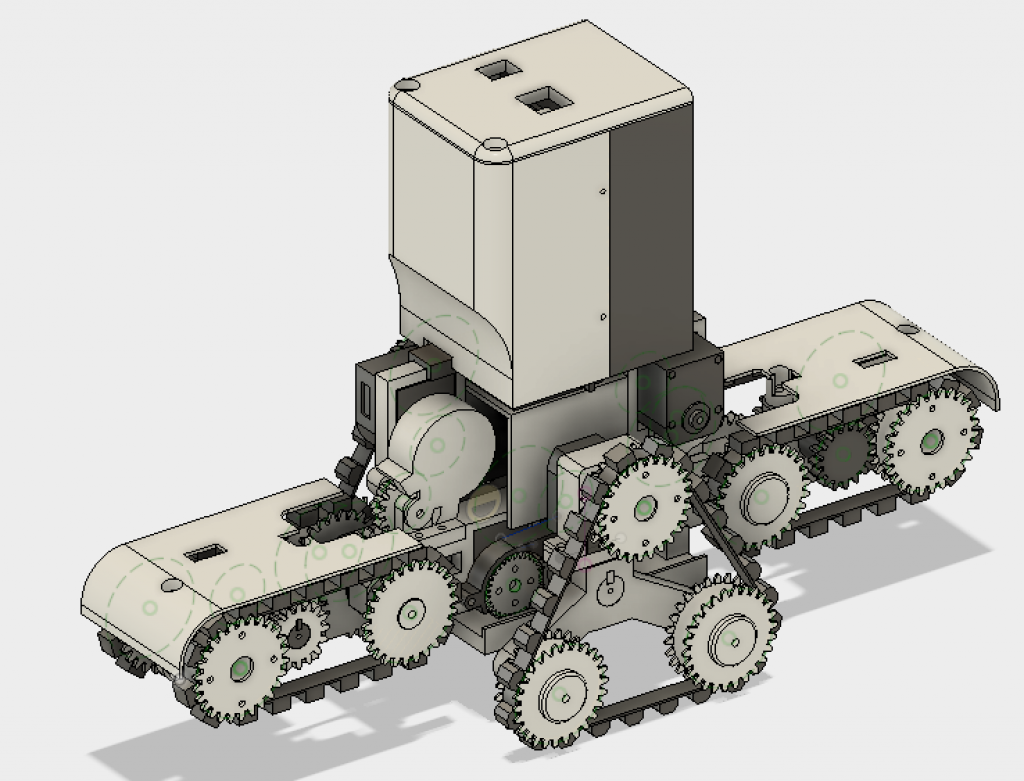
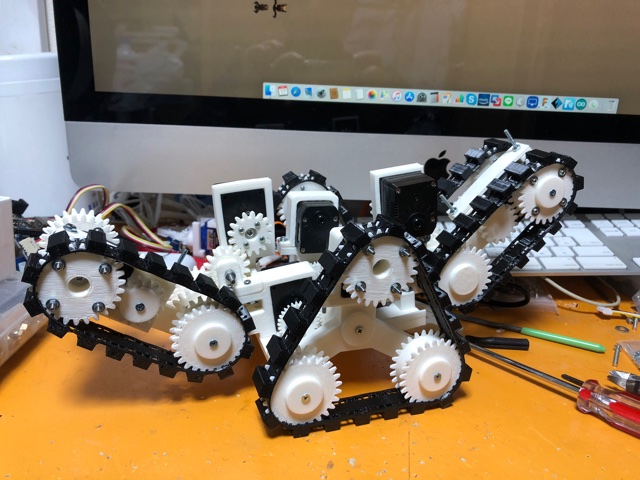
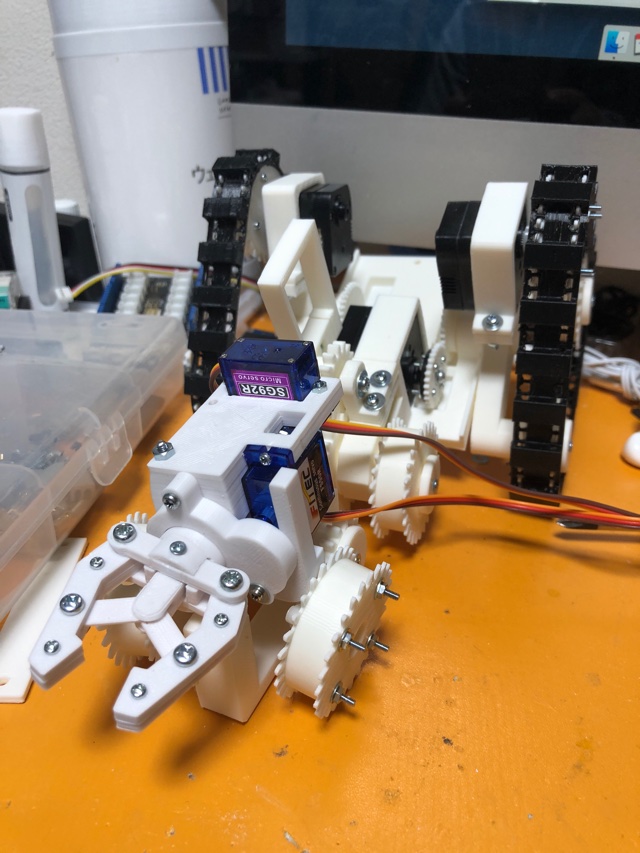
現在製作しているロボットは、シュチュエーションによって適した形態に変形させようと思っているのですが、そのためには8つのサーボモーターを自在に設定し、一度に呼び出せる処理をしなければなりません。
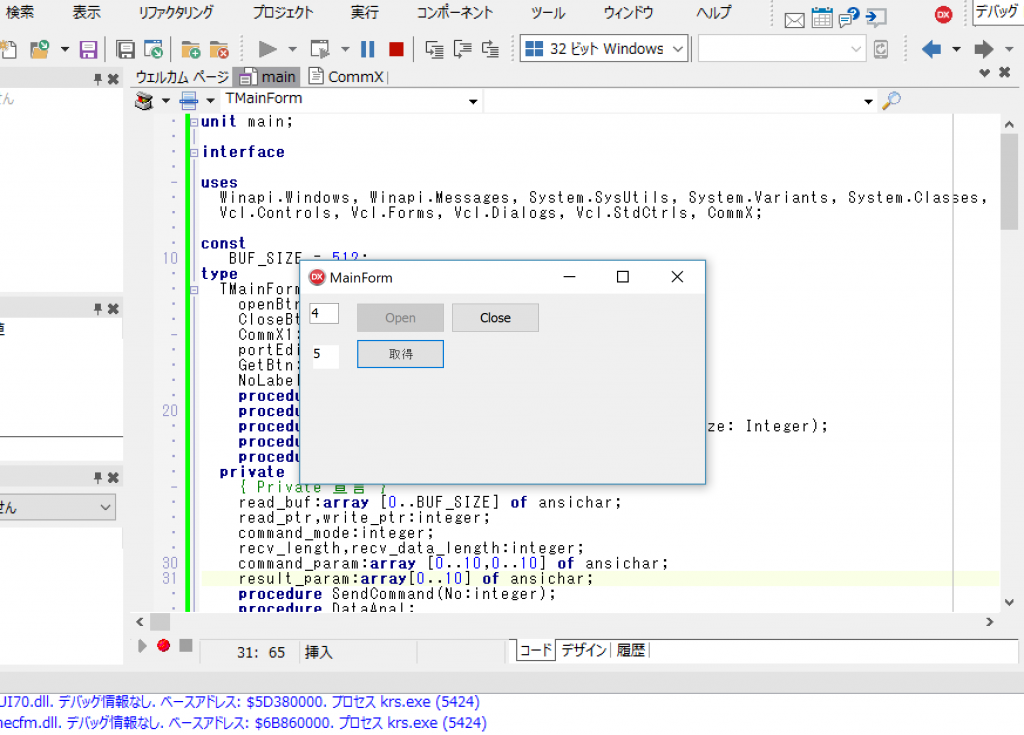
まずは、windowsでUSBアダプタ経由でコマンドを送りサーボを駆動するプログラムを開発することにしました。
近藤科学のサーボはICSという規格でシリアル通信でコントロールすることが出来るため、ソフトウェアリファレンスのコマンドパラメータを見て製作しています。
まずは、サーボモーターのIDを取得する処理を書いてみました。
シリアルポート4番につないだID番号5のサーボモータを読みだした結果、正しく読み出せていることを確認できました。
このプログラムを発展し、スライドバーなどを追加して各軸を自由に動かせるようにしてみたいと思います。