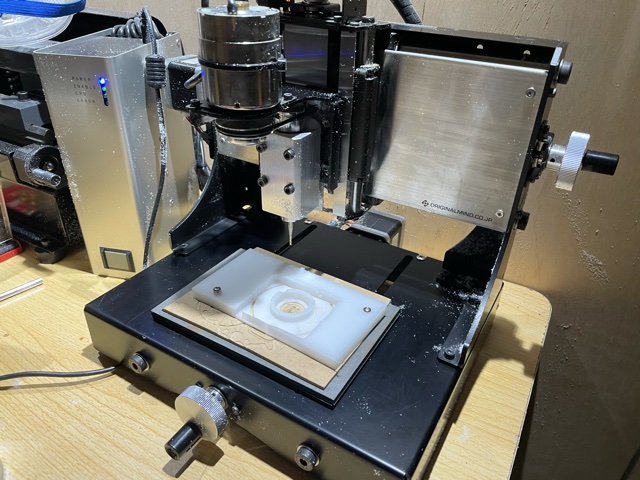
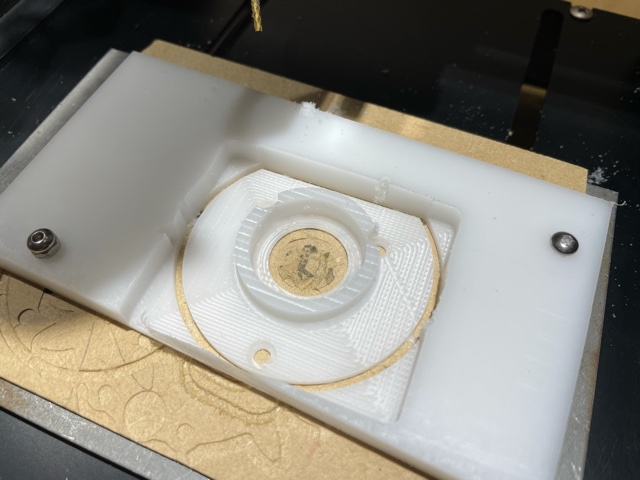
メカべこのアナログ入力とサーボコントロールを使って、「土壌中の湿度が乾燥になったときに自動で給水する」システムを作りました。
こういったアプリケーションを作ると地元の農業高校の生徒がマイコン制御を学ぶ際により具体的に興味を持って学べると思います。

実際に給水している動画はこちら↓
ここをクリックすると、給水している動画が再生できます。

ロボット教育支援・パソコンサポート
メカべこのアナログ入力とサーボコントロールを使って、「土壌中の湿度が乾燥になったときに自動で給水する」システムを作りました。
こういったアプリケーションを作ると地元の農業高校の生徒がマイコン制御を学ぶ際により具体的に興味を持って学べると思います。
実際に給水している動画はこちら↓
ここをクリックすると、給水している動画が再生できます。
福島県らしいもので、誰でも簡単にプログラムの学習を楽しく行えるロボットを考えてみました。
写真のような「赤べこ」のロボットを弊社で設計・製造・製作し、「メカべこ」と名付けました。

メカべこは、1つのシリアルインサーフェイス、1つのI2cインターフェイス、2つのデジタル入出力ポート、2つのアナログ入出力ポートを持っており、4つの脚を動かして前進・後退・左右旋回が行えるロボットです。

このメカべこに音センサーをつけて、黙食をサポートできるようにしてみました。
黙食とは文字通り「黙って食事をすることで新型コロナの感染を抑えよう」という考え方ですが、店舗などでお客さんに店側が注意するのはなかなか難しいもの。
そこで、周りが想像しくなってきたら、メカべこがジタバタすることでお客さんに注意を促そうというのが、このメカべこの機能になります。
実際に動作させた状態の動画はこちら↓
このメカべこはardublockでプログラムできるので小中学生からでもその仕組みを理解できれば誰でも自由にロボットを動かすことができます。
先日の郡山のイベントでMISORA miniを動作させたときにフリッパー周りのパーツが破損しました。
3Dプリンタで作成したパーツでしたが、応力に勝てなかったようです。
そこで、ジェラコンの削り出しにすることにしました。
50mm角程度の大きさですが、加工に15時間くらいかかります。
この部品を4つ作ります。
この部品に側面からの穴を3箇所追加工します。
手持ちのCNCは横からの穴加工ができないので、位置合わせ用の治具を作りボール板で穴あけをします。
ビックパレットふくしまで開催されたロボット・航空宇宙フェスタふくしま2020に南相馬ロボット産業協議会としてMISORA miniのデモ展示とMISORAのプロモーションビデオの展示を行ってきました。
大手企業や各種ベンチャーが革新的かつ大掛かりな展示を行う中、弊社がというか私が1人で設計・製造・組み立て・制御まで行ったMISORA miniを展示するのは夏休みの自由研究をぽつんと展示してるようで気恥ずかしい部分がありましたが、実機のMISORAの動きを伝えるのにはminiが有用なので操作をしながら説明してきました。
初日は企業、次の日は一般と様々な方々にMIOSRAを知っていただけたと思います。

相馬漁港湾内で、JAEA殿の無人船に搭載している採泥ロボット(海底の泥を柱状に採取するロボット)の納入確認をしてきました。
数社が協力し、この無人船を製作しましたが各社の高い技術力を間近で見れますので色々と勉強になりました。
ちなみに、採泥ロボットですが、去年の納入時には問題なく動作しておりましたが、今回仕様を変更したうえでのトライになりました。
結果は、堆積した泥の影響を強く受けて8回採泥動作ができるうち数回で採泥不能になりました。
装置につけたカメラの映像などから対策を立て再度トライする予定です。

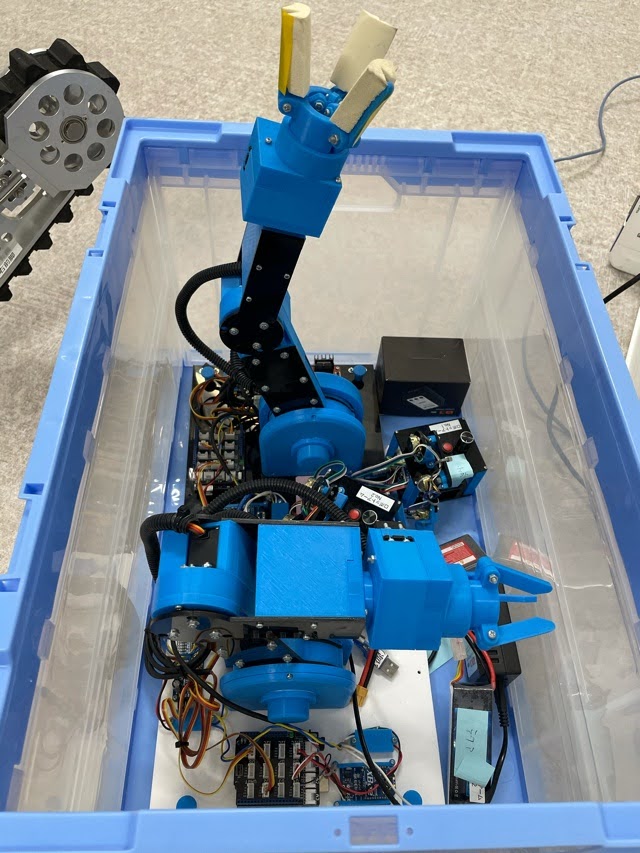
先日のRTFのドローン縁日で、ロボットアームを使った飴の掴み取りを会津大学さんで行いましたが、あまりに盛況でアームを休みなく動かしたため破損したとの話があり、引き取り修復を行いました。
内部ギアなども3Dプリンタで製造しているのですが、これが破損していました。
材質をポリカに変更し、出力条件を変えたギアを製作し補修しました。
このアームは今度のビックパレットふくしまで行われるイベントで使われるようです。
今年開催される予定だったWRS2020が延期になってしまい、せっかく小高産業技術高校やテクノカレッジ浜の学生がMIORAのオペレータに選出されたものの、その技を披露する機会が失われてしまったということで、この度、会津大学様のご厚意で南相馬と会津大のロボットを使った模擬WRSをRTFで行うことができました。
この日のために数回に渡りのべ5時間ほどの操作訓練を小高産業技術高校の生徒が受け、その中で3年生の佐藤くんがオペレーターとして出場しました。
出場選手と関係者はこのようなパドックで準備を行います。

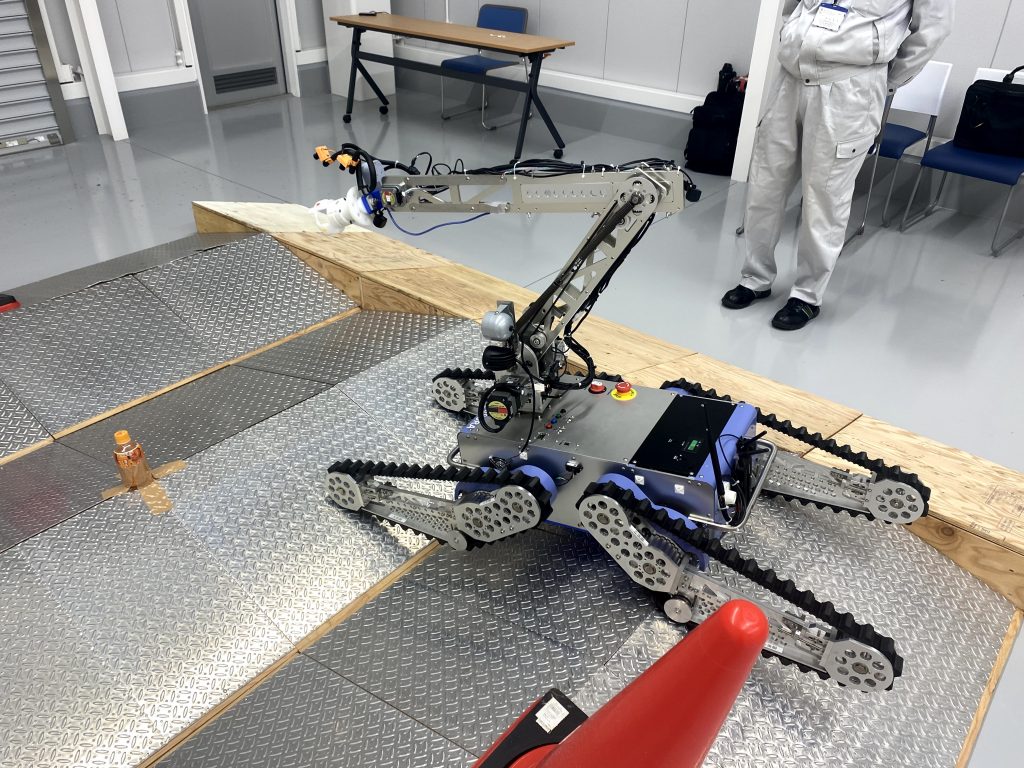
実際に行われた競技の様子です。
手前のオレンジのヘルメットのオペレータがカメラ映像だけでロボットを操作してミッションをクリアしていきます。
彼はかなり優秀な生徒で、すぐに操作を覚えてMISORAをコントロールしていました。

これは壁に貼られたQRコードを読み取り、何が書かれているかを判別する競技です。
残念ながら競技途中でQRコードを読み取るカメラが暴走してしまい、全てを読み取ることができませんでした。

全部で6競技を行い、なんとか僅差で会津大学のロボットにMISORAが勝つことができました。
放課後になるとMICのMISORA保管倉庫に小高産業技術高校の生徒がきて操作訓練を行います。
1時間くらいの操作練習になりました。

これは、起伏のあるコースを走る練習です。
山の頂点にロボットのお腹が擦ってしまい走行不能になるので、走らせるためには工夫が必要です。
MISORAの場合、脚が長いので変形すると割と楽に走行させることができました。
福島民報社主催のイベントがRTFでありました。
ここではMISORA miniとMISORAのパネル展示を行いました。

県内全域から参加者を募りましたので、二本松などからも製造業に携わる方々が来ていました。
市の企業が垣根を超えてロボットを製作したという事実に大変驚いておられました。
MISORA miniは小学校低学年や幼稚園生なども操作体験をしましたが、みなさん上手にアームを操作できていました。
MISORAのコントローラは弊社が考えた独自のアイディアを随所に盛り込みましたが、その中の1つが特許性があるということで、申請作業を行っておりました。
そのため、MISORAに関する様々な情報公開ができない状態でしたが、この度無事に特許申請も終わりました。

マスタースレイブにはある弱点があり、今回申請した特許はその弱点を簡単にかつローコストで操作性も直感的に解決する方法になります。