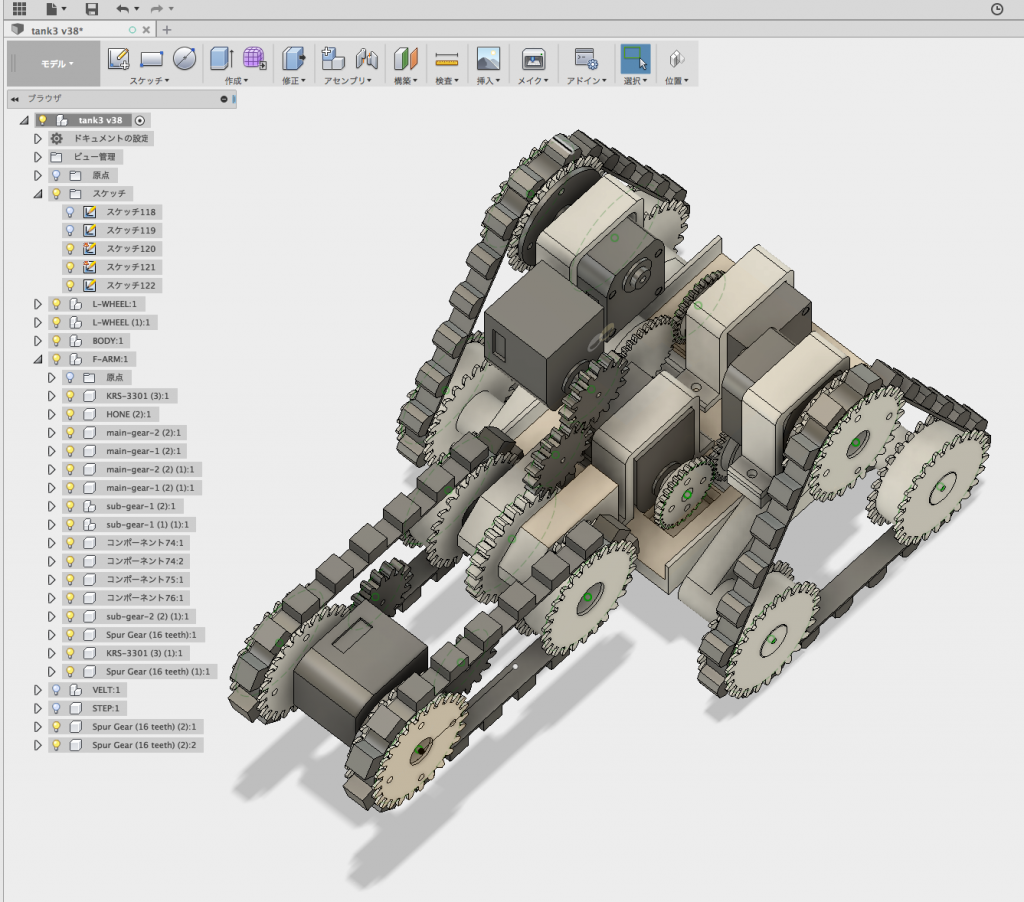
近藤科学のKRS3301があったので、このモータを使ったクローラーロボットを構想してみました。
WRSでは旋回性能を要求されるミッションもあるので、不整地走行の際の車高も確保し、なおかつ旋回性能も上げられそうな形状を考えて、1/3程度の寸法の階段を想定して登坂もできるようなクローラアームを設置してみました。
(まだアームを持ち上げる機構は煮詰めてません)
全体的に剛性もあげて動作も信頼性が向上するようにしたいとおもいます。

ロボット教育支援・パソコンサポート
近藤科学のKRS3301があったので、このモータを使ったクローラーロボットを構想してみました。
WRSでは旋回性能を要求されるミッションもあるので、不整地走行の際の車高も確保し、なおかつ旋回性能も上げられそうな形状を考えて、1/3程度の寸法の階段を想定して登坂もできるようなクローラアームを設置してみました。
(まだアームを持ち上げる機構は煮詰めてません)
全体的に剛性もあげて動作も信頼性が向上するようにしたいとおもいます。