
今日は午前中でPCサポートの仕事が終わったので、午後からロボットのモーションコントロールソフトの開発の続きをしています。
開発はDelphiというpascal言語で行います。
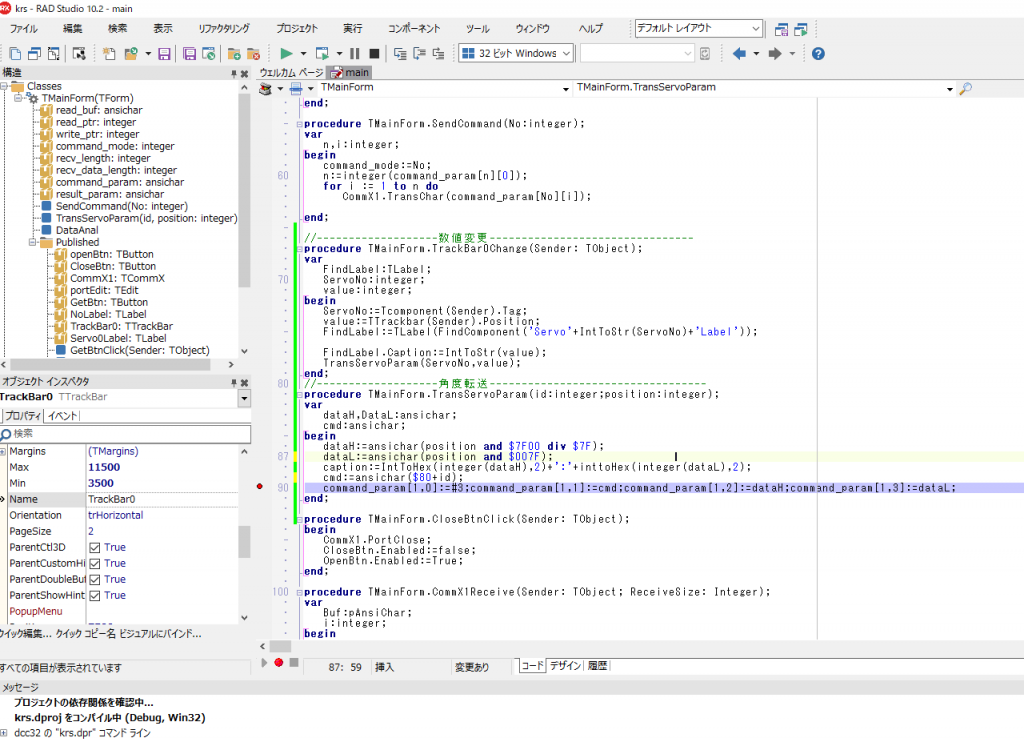
IDEなので実行を途中で止めて変数の中身などを確認できるのでデバッグもはかどります。
KRSサーボ は0x80+id番号と2バイトのポジションフレームで角度データを転送しますが、それぞれの上位15bit目はマスクして転送します
。
なので、上位1バイトは0x7Fでアンドをとってから0x7Fで割ってシフトし、下位1バイトはそのまま0x7Fでマスクする様になります。
弊社の強みは、メカのプロトタイプ設計から造形、マイコンやPCのアプリ開発まで1人でできる所にあります。