
簡単に操作ができるクローラーロボットの構想で、実験モデルを作ってみました。
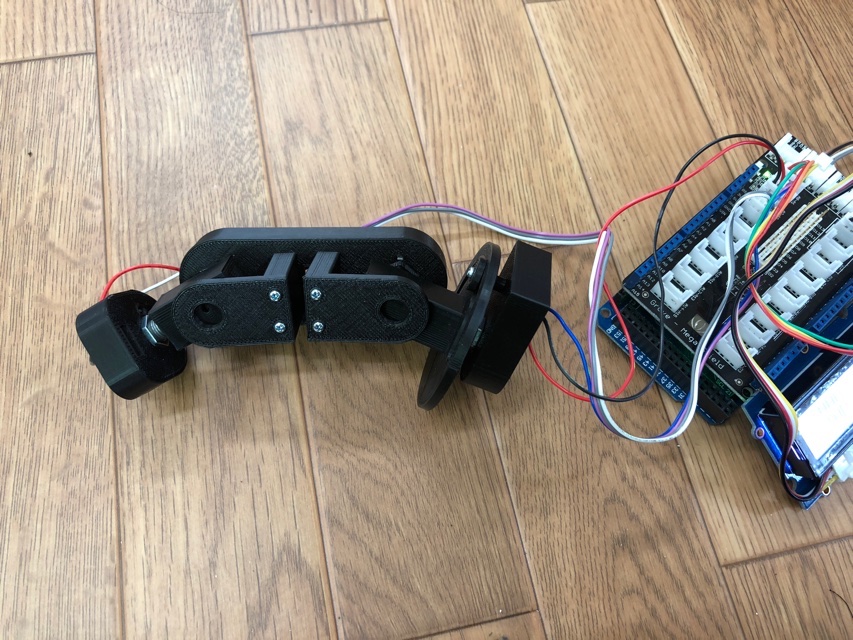
まずは、こんな感じのコントローラーを作り、
南相馬ロボット評議会のロボット分科会で使ったクローラー模型のプログラムを移植。
そうしてできたロボットの動画がこれです。(画像をクリックで動画のダウンロードが始まります)
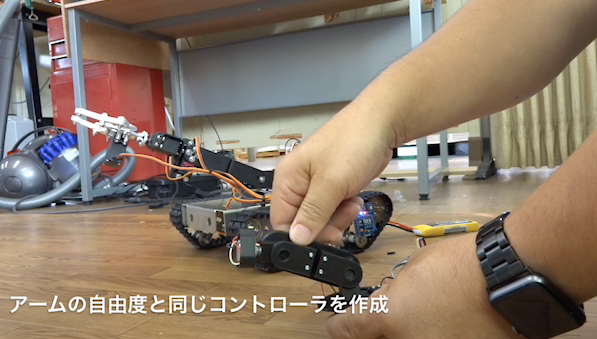
思いの外追従性が良いので、先端のハンドもトレースするように作ってみようと思います。
このロボットは今年の南相馬市のこども科学祭で弊社出展作品として出して、子供達に使ってもらおうかと思います。
簡単にロボットの操作ができれば、コントローラとして成功だと思います。
ロボットのコントローラーはなぜかゲーム機の流用が多く、その理由は「ゲーム世代の子供が使うから」とか。
しかし、実際は作り手が入手しやすく制御しやすいからというのが一番の理由な気がします。
それは「ものづくり」としてどうなのだろう?と思い、別なアプローチの操作系を作ってみました。
移動系はこれからですが、操作をどのようにするかはすでに構想しており、他の出品物とは異なるモノになる予定です。