会津大学の皆さんとチームMISORA、南相馬市役所の関係者で内堀県知事に表敬訪問に行ってきました。
当初、秘書課の方が司会で報告会を行う予定でしたが内堀県知事自ら司会をしていただき報告会を行うことになりました。
コロナ関連でなかなか明るい話題がない中ですので今回の大会が無事におこなわれしかも福島県勢が2位と3位を占めることができましたので大変喜んでいただきました。
これもイノベーションコースト構想が福島県に根付いた結果だと思います。
様々なご支援、ありがとうございました。




ロボット教育支援・パソコンサポート
会津大学の皆さんとチームMISORA、南相馬市役所の関係者で内堀県知事に表敬訪問に行ってきました。
当初、秘書課の方が司会で報告会を行う予定でしたが内堀県知事自ら司会をしていただき報告会を行うことになりました。
コロナ関連でなかなか明るい話題がない中ですので今回の大会が無事におこなわれしかも福島県勢が2位と3位を占めることができましたので大変喜んでいただきました。
これもイノベーションコースト構想が福島県に根付いた結果だと思います。
様々なご支援、ありがとうございました。
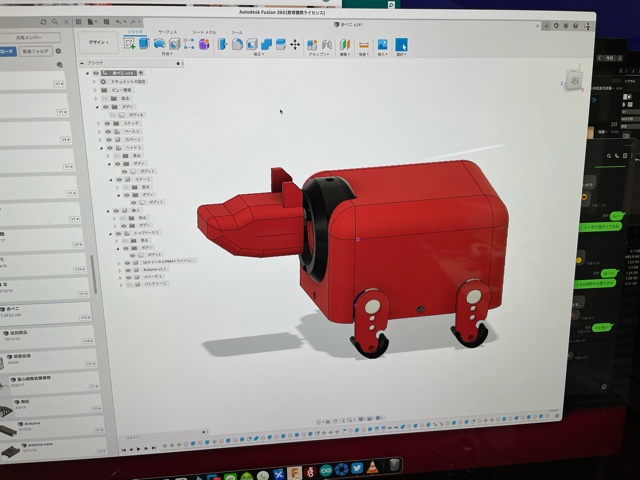
今回のWRS2020を記念してミニチュアを製作しそれぞれ会津大学と千葉工大の関係者の方々に送りました。
また、この3台セットを福島県知事の内堀様に贈呈する予定です。

小高産業技術高校は全国の高校で行われているマイスターハイスクールの指定校に選ばれました。
それに伴い、機械科でも地元企業から外部講師を招聘し授業を行うことが決まり弊社に依頼がきました。
メカ設計者も多少制御が行えると出来る仕事の幅や合理的な開発が行えます。
そこで、マイコン制御の学習を行うことになりました。
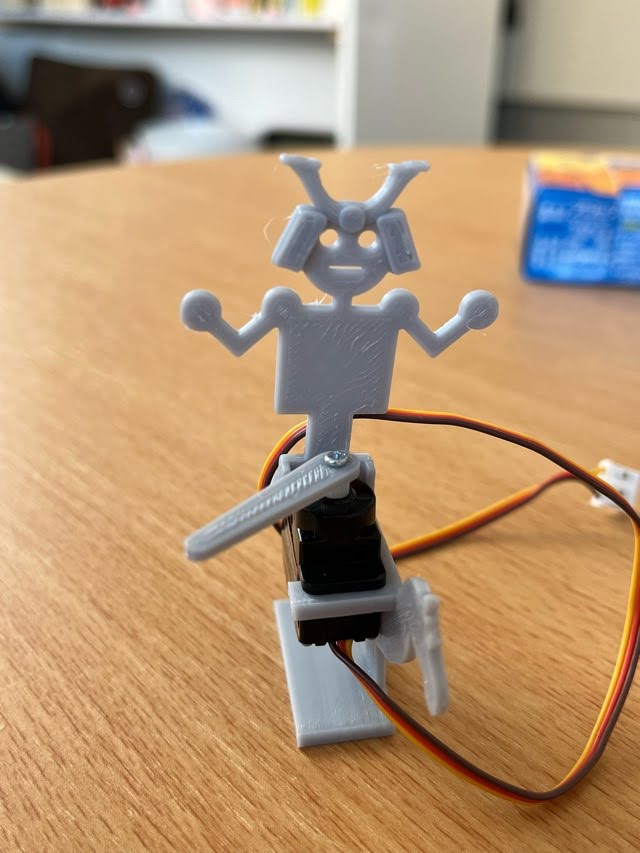
今回はサーボモータを1つ使って制御の学習をするために「騎馬武者マン」というおもちゃをみんなで組み立て、制御することにしました。
相馬野馬追の地なので騎馬武者マンにしたわけですが、向かい合って対峙する騎馬武者マンが早押しによって相手の騎馬武者マンを刀で吹き飛ばすという感じのおもちゃにしました。
ゲームデザインとして、相手のお手つきを防ぐために互いに攻撃可能なことを相手にLEDの点灯で伝え、そこからボタンの早押しでどちらかの刀が振り回されることになりますが、この攻撃可能な状態をボリュームの回転で行うので途中で引っ込めて攻撃不可にするとことで相手のお手つきを誘発させます。
そうなると相手は2秒間の動作停止になるのでその間に刀で吹き飛ばされやすくなります。
なので攻撃可能かどうかの駆け引きと、ボタンの早押しの反射神経の2つの条件で勝負が決まるのでけっこう複雑なゲームが展開できます。

WRS2020で準優勝した結果報告を南相馬市長に報告に行きました。
大変喜んでいただき、長く頑張ってMISORAを製作した甲斐があったと感じました。
予定時間を過ぎても門馬市長とのモノづくりの話が弾みました。
この時、市役所庁舎にMISORAの快挙の横断幕を提示する話をいただきました。
とても光栄に思いました。

市販のラジコンカーをArduinoで制御する講習を行いました。
トイラジコンなのでコントローラのスイッチ部分をリレーで制御しました。
合わせてラジコンの改造の仕方もレクチャーしました。
・ハンドルのキレ角を変えるのにはどうしたらいいのか
・ステアリング機構はどの様になっているのか
機械科の生徒なのでメカ的な話も含めて説明しみなさん理解が進んだ様です。

昨日、WRS2020福島大会が終了しました。
南相馬の企業が1から作り上げたロボット「MISORA」で何とか初出場、準優勝という結果を出すことができました。
弊社は、このロボットのコントローラコンセプト設計、製造から組み立てプログラミング、制御仕様決定などを行いました。
決勝戦で動画を確認しましたが、競技開始から2分くらいですぐに動いております。
MISORAは機械学会会長賞、事業化賞もいただきました。
機械学会賞はコンセプトに革新性がある他と被らない部分が評価されたと思っております。
また、事業化賞は南相馬市企業の高い製造能力によって作られたMISORAが市販レベルのロボットであることを証明してくれたと感じております。
大会で上位に行くことは重要ですが、製品として評価してもらうことがものづくりに携わる1人としては本当に嬉しいです。
MISORAは大会中、主要部品の大きな破損もなく動作不能に陥ることもなく無事に全ての競技を行うことができました。
操作は小高産業技術高校の生徒2名が行い、わずか5時間足らずの練習で大会に挑みました。
それでも高い操作技術を駆使できたのは2名のセンスと退会休憩時間中も模型のMISORAを使ってコースのシミュレーションをした結果だと思っております。
昨夜11時ごろに震度6弱の地震が南相馬市を襲いました。
ちょうど家の2階にいてiMacを使っていた時で、「ゴゴゴゴゴ」という地鳴りとともに大きい揺れ。
長く揺れたので、「また震災みたいな地震がきたのか!」と焦りましたが程なく収まり、余震も弱い感じでした。
家は耐震住宅だったので壁にヒビが入ることもなく大丈夫でしたが、TVはスタンドごと40cmくらい移動し、赤べこは横倒しになったり、倒れた本棚が壁に穴を開けたり(これが一番悲しい)しました。
外を確認したらスクーターが車に倒れててバンパーに傷が入ってたように思ましたが見てないことにして家に入りました。
簡単に片付けをして、床に謎の粉が少し降り注いでたので掃除機をかけて早々に寝ました。
先ほど、事務所にも行き状態を確認しましたが、こちらはもとから散らかっているのでどの辺が被害なのかわからない状態くらいになんともなかったです。
心配の電話やSMSなどをいただきましてありがとうございました。
マイコンとサーボをいじり始めると、二足歩行ロボットを作りたくなります。
なので設計・製造・製作してみました。
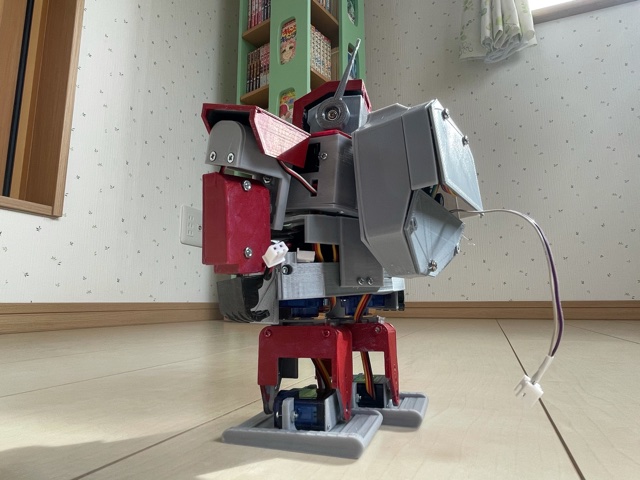
名前は、ビルドウォーカーです(センスなし)。
高さは20cm以下。重さは大きいリンゴ1個分くらい。
立ち姿

バックショット
スタンド状態から歩行し、左右のパンチを繰り出す動画はこちら↓
一応、後退も左右旋回もできています。
しかしまあ。。
単に歩かせるだけで満足してしまい、この次に何をするかっていうのがまったく思いつかないです。
車両型の方が色々と拡張性が望まれるんですけどね。
こうしてロボットを作って動かすと、歩行型のロボットって、コストの割には倒れてすぐに壊れるし、重いとバランスが崩れて動けないし、移動も遅いので例えば戦争で使っても戦果は望めそうもないなぁーって思います。
ちなみにこのロボットは机の上から落としてしまい、左肘のサーボが逝ってます。
幸いにも壊れたのはそこだけでした。
展示会用に写真を撮りました。
これはボツにしたものですが、iPhoneのポートレート機能を初めて使ってみました。