WRSではロボットが階段を昇降するミッションがありますが、この移動をカメラ映像だけで行うのは結構難しいです。
(平衡感覚をカメラ映像からだけでは把握しにくいため)
そこで、ボタンを1つ押すだけで自動で階段を昇降する機能を作って実験してみました。
この機能は高校生に好評で、四人が事前知識も訓練も無しにチャレンジして全員が1回で階段の昇降動作を行うことができました。

このアングルのMISORAはかなりかっこいいです。

ロボット教育支援・パソコンサポート
WRSではロボットが階段を昇降するミッションがありますが、この移動をカメラ映像だけで行うのは結構難しいです。
(平衡感覚をカメラ映像からだけでは把握しにくいため)
そこで、ボタンを1つ押すだけで自動で階段を昇降する機能を作って実験してみました。
この機能は高校生に好評で、四人が事前知識も訓練も無しにチャレンジして全員が1回で階段の昇降動作を行うことができました。
このアングルのMISORAはかなりかっこいいです。
45度の登り坂と31度の下り坂の階段をMISORAを使って目視で昇降させてみました。
かなりきつい角度なので、転げそうになる恐怖がありましたが、なんどか登らせることができました。
カメラ映像のみで操作すると難易度がかなり増しますが、こちらも成功しています。

今年開催できなかったWRS2020ですが、運営も参加者も含めて模擬大会を行い、運営進行がスムーズに行えるかどうかの検証をする機会があり、会津大学のUoAと南相馬のMISORAが参加して競技を行いました。
3日間のうち、初日と最終だけは参加できましたが、ちょうど2日目が川俣高校の授業と重なり参加できませんでした。
MISORAの結果は散々で、改良ポイントが明確になった大会でした。

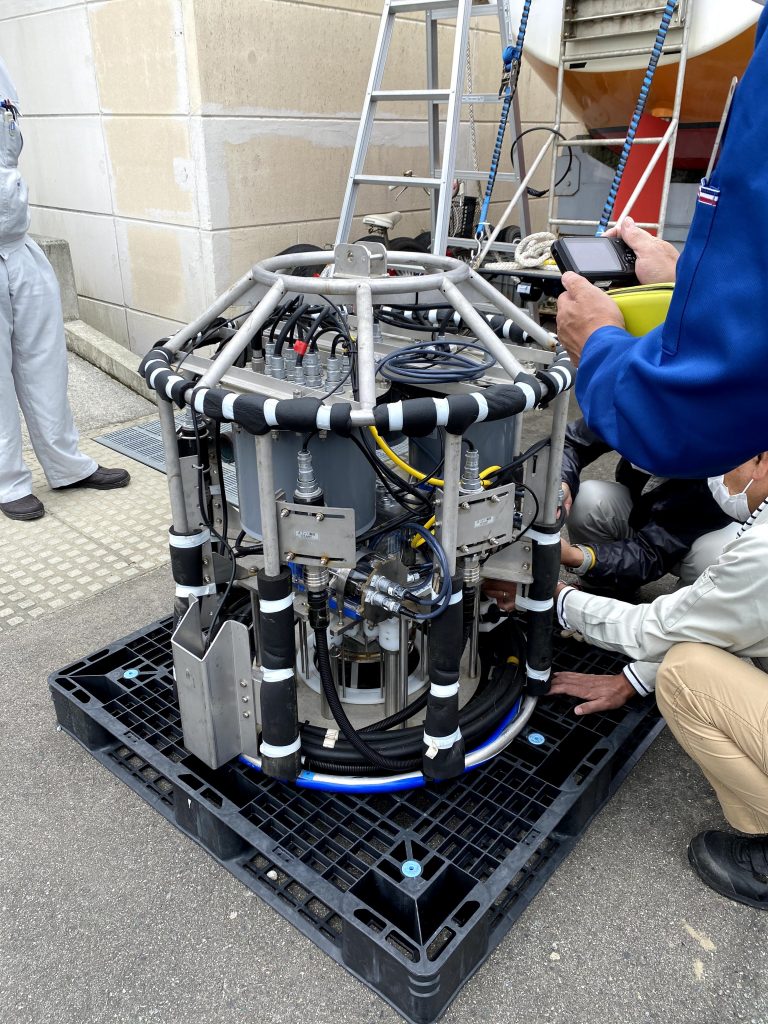
JAEA殿の無人船に搭載されている、柱状採泥機の搭載のためのセッティング立ち合いを行いました。
11月に実際に海に出て海底の泥の採取を行います。
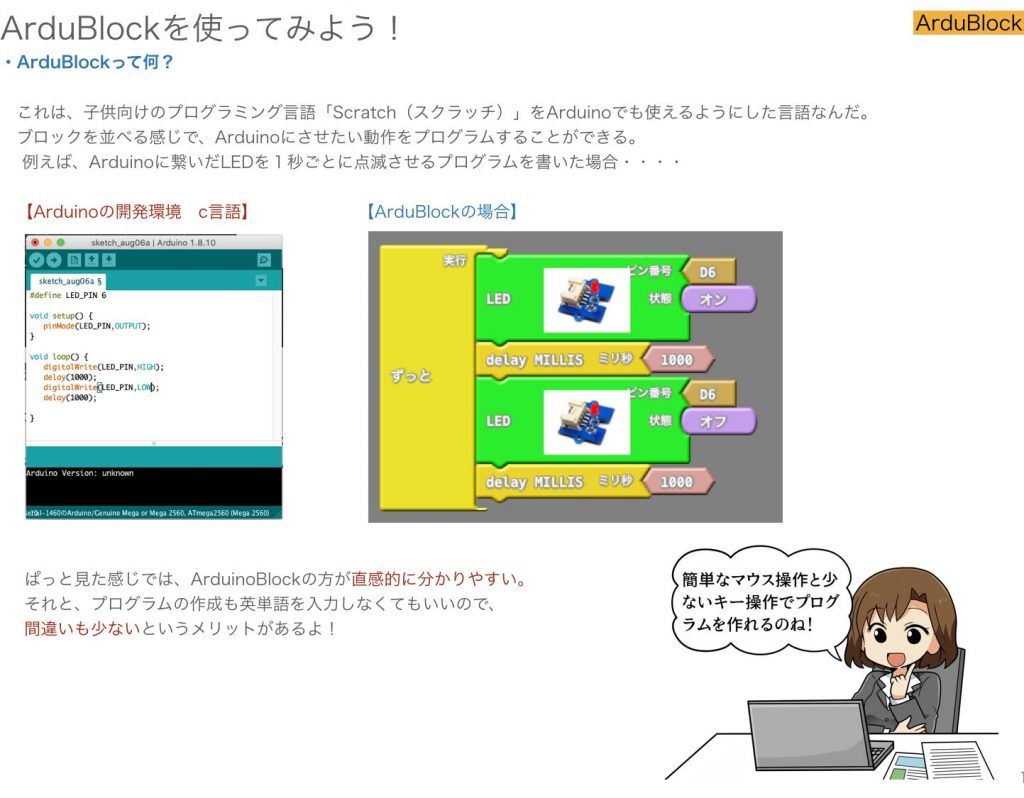
ardublockを用いたarduinoの授業を川俣高校で行っています。
動画のロボットはそこの機械科の生徒が部品を加工して組み立てたクローラロボットになります。
重量はなんと15キロ!
大きさもかなり大きいロボットになります。
川俣高校殿で購入したロボットアーム(写真奥)を制御するためのマスタースレイブコントローラ(写真手前)を設計・製造しました。
6軸アームなので、コントローラの関節も6つあります。
これをXBeeで無線コントロールします。
ロボットアームは川俣高校で製作中のクローラロボットに搭載する予定です。

ardublockを使って、直感的にarduinoの制御を学ぶ授業を計画しています。
イノベ機構の補助事業で地域の学校に出向いて数回授業をする感じです。
こんな感じの資料を数10ページほど作成し、実際にarduinoを動かしながら学習していきます。
MISORAにはMISORI(Master Input Slave Output Robot Interface)というコンローラを自作して使用しているのですが、今回、それをさらに進化させたMISORI-2というコントローラを製作しました。
従来よりも大きくなりましたが、その分、これまで以上に高機能でなおかつ拡張性が向上しています。
WRSにはこのコントローラで挑みます。

会津大学様の相双地域向けIT教育授業で弊社がArduinoの授業を受け持つことになりました。
単にLEDやブザーを光らせたり鳴らしても面白くないので、戦うロボットを制御することにしました。
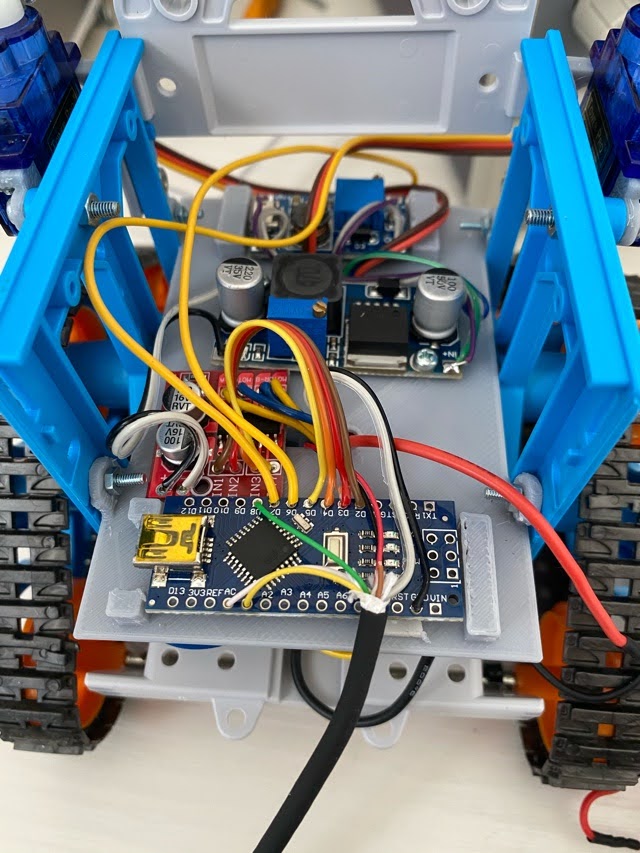
ベースはタミヤのクローラロボットで、それにモータドライバとサーボモータとarduino nanoを搭載してジョイスティックで制御できるようにしました。
右の腕には全ての敵を薙ぎ倒す「トシタネブレード」を、左手には全ての攻撃を跳ね返すシールドを持っています。
頭には、相馬藩の旗指物がつけられるようになっていて、これを弾き飛ばされた方が負けになります。
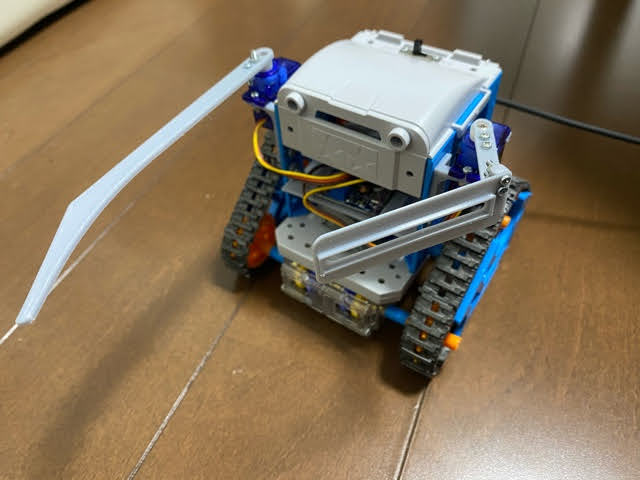
こんな感じのロボットを5台製作し、みんなで制御の学習を行ってみようとおもいます。
動作はこんな感じです。
トシタネブレードを振り回すキバムシャーン
MISORAを開発する場合、デバック中に本体を壊す可能性があるような動作(段差超えなど)は、MISORA miniを使ってプログラムを作成し、MISORAに移植する方法をとっています。
これにより、狭いフィールドでも効率的に大きいロボットの動作検証を先行して行うことができます。
これは、MISORA miniが段差を乗り越える動画になります。
こうしてプログラムの検証を重ねています。