
学習会ロードマップ
【ねらい】
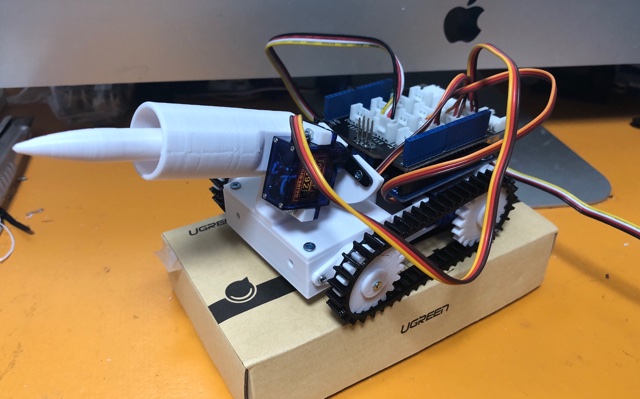
Arduinoを使ったクローラーロボットを通じて制御を学び、ロボットをビルドアップすることで不整地走行が行えるアームなどを備えたロボットを製作することを目的とした学習を行う。
1)クローラーロボット作り
a-1)クローラーの組み立て
・必要な工具
・部品リスト
・組み立て手順書の作成
a-2)プログラム環境の準備
・ArduinoIDE(開発環境)のインストール
・プログラムの読み出し方
a-3)プログラムの書き込み(片側のモーターだけ動作するもの)
・プログラムの書き込み方
a-4)旋回動作を確認する
・動作の確認
(ボリュームで前進後退、スイッチでミサイル発射)
b-1)プログラムの作法
・Arduinoについての説明
・マイコンが扱える電圧
・アナログとデジタル(b-2の入力の実験もここで行います)
・プログラムの構造
・setup と loop
・変数
・演算
・条件分岐
・繰り返し
b-2)入力の実験(各種センサ)
・スイッチ(プッシュ・タッチ)の入力
・光センサの入力
・温度センサの入力
・ボリュームの入力
b-3)出力の実験(LEDなど)
・LEDの出力
・リレーの出力
・ブザーの出力
・サーボモータの出力
b-3-1)入出力の組み合わせ
・スイッチを押したらブザーを鳴らす、LEDをつける
・温度や光が変わったらブザーを鳴らす、LEDをつける
b-4)ジョイスティックの入力でサーボモーターを動かす方法を
説明
・入力と出力の分解能の違いの説明
c-1)回転式サーボと旋回サーボの違いの説明
c-2)ロボットを前後左右に動くように改造してみる。
・ジョイスティックの接続
c-3)ミサイルを発射できるようにしてみる。
c-4)センサの入力でロボットの動きを変えてみる。
(壁を検知したら自動でミサイル発射、
暗くなったら停止、明るくなったら前進する、
ミサイル発射前にライトをつけるなど)
2)ロボットハンド作り
a-1)ロボットハンドの組み立て
a-2)ロボットハンドの制御(開閉)をこれまでの学習を元に
自分で作ってみる。
3)ロボットとハンドの合体
a-1)ミサイル発射装置を外し、ロボットハンドに切り替えて
みる。
4)クローラーロボットの拡張
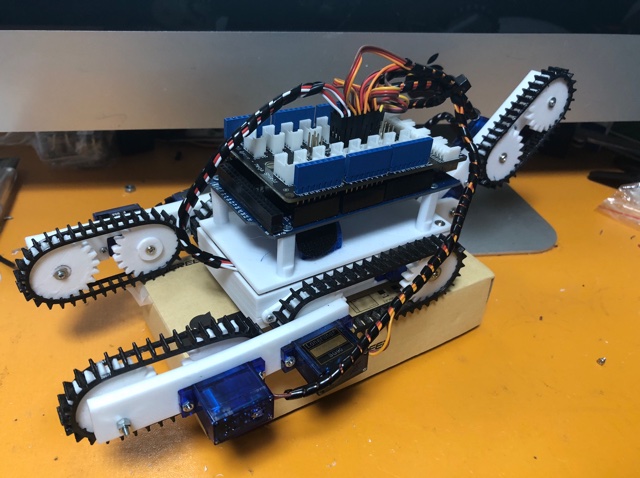
a-1)段差を越えられるように、クローラーアームの追加。
a-2)カメラを搭載して画像を観れるようにする。
a-3)無線で動作させる。
3月 1)のa-1)からb-4)まで
4月 1)のc-1)からc-4)まで
5月 2)のa-1)から4)のa-1)まで
6月 4)のa-2)からa-3)まで