誠に勝手ながら利用していたネットワーク会社のサービスが日本国内で終了したため、FAX番号を掲載を削除しました。
弊社へのお問い合わせはメールもしくはSMSでお願い致します。

各種ソフトウェア開発および試作設計支援、パソコンサポート
誠に勝手ながら利用していたネットワーク会社のサービスが日本国内で終了したため、FAX番号を掲載を削除しました。
弊社へのお問い合わせはメールもしくはSMSでお願い致します。
クラウドファンディングのX68000Zが届いたのでそのサイズに合った液晶モニタを準備した。
市販の車載用液晶モニタを改造する。
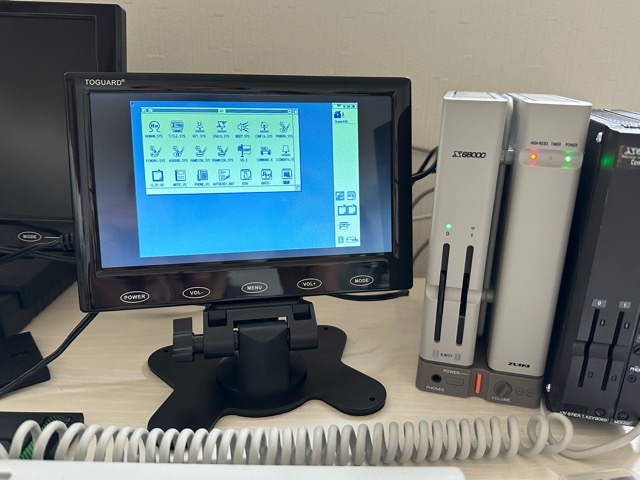
使うのは7インチの1024×600ドットの液晶モニタ。安価なので左右が見切れても妥協する。
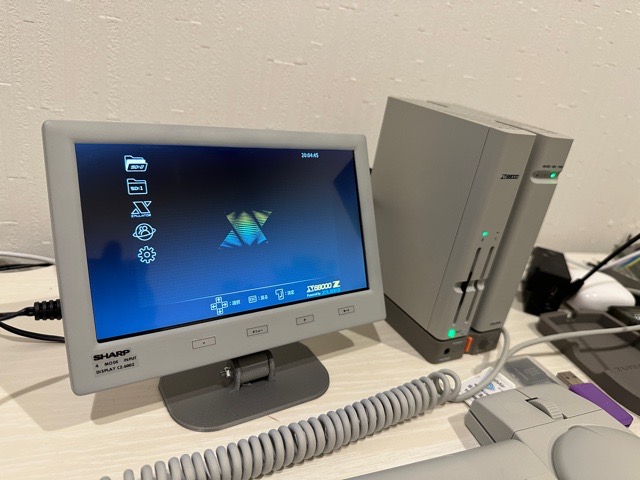
しかし、X68000Zは初代のオフィスグレーなのでそれに合わせた色にしたい。
表面をペーパーがけしてプラサフを吹いたが、色合いが偶然マッチングしたのでこの上から塗装はせずそのままにすることにした。

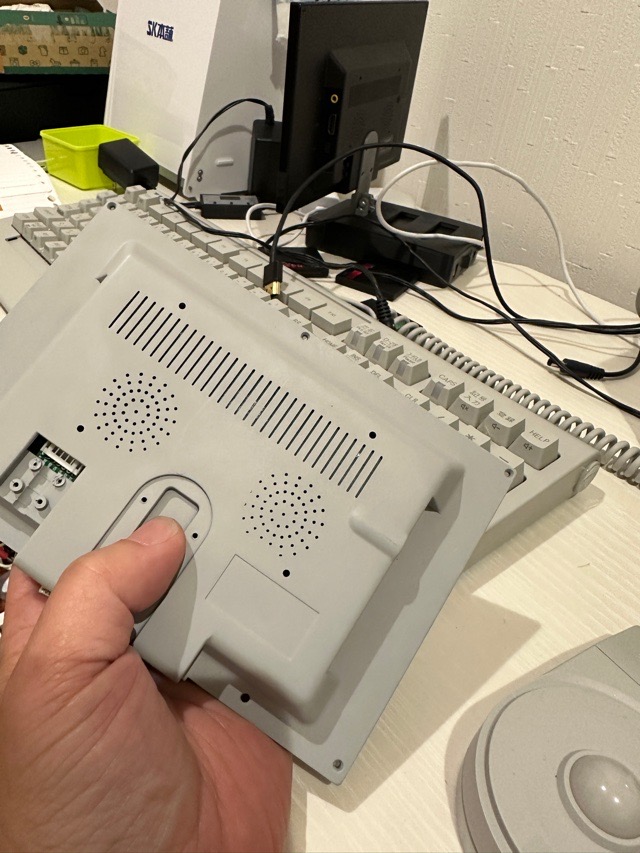
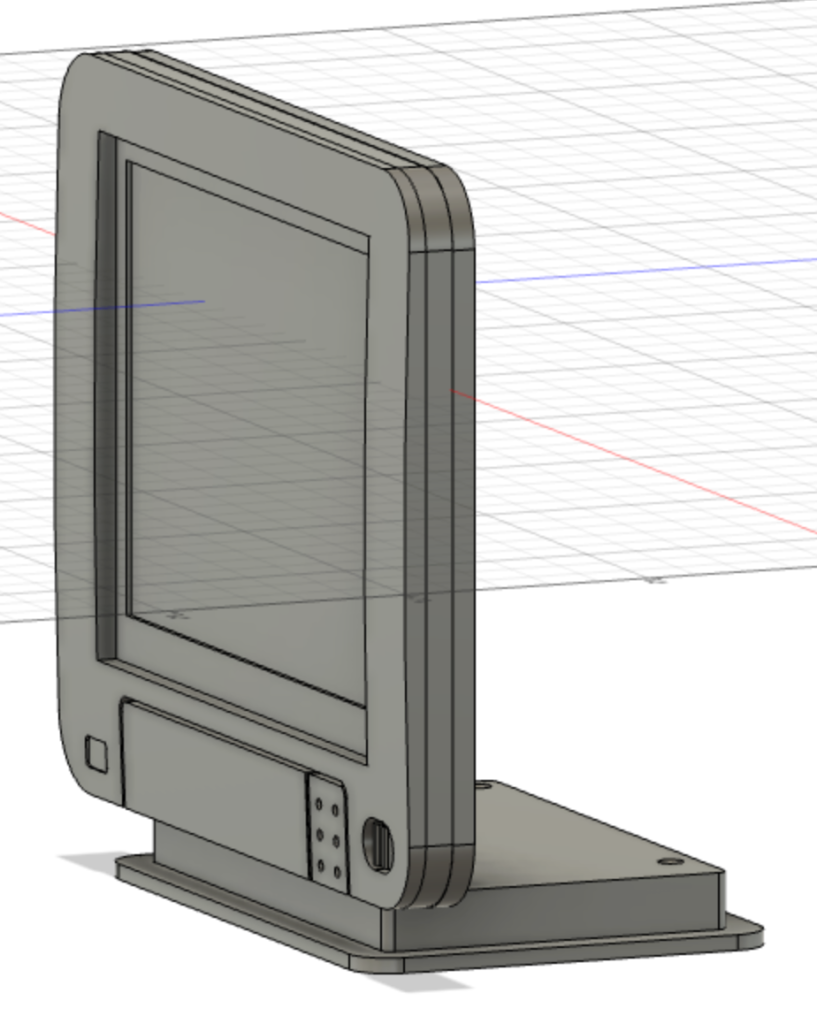
スタンドは設計・製造する。標準品があまりにもゴツいので。可倒領域を広め携帯性も考慮。

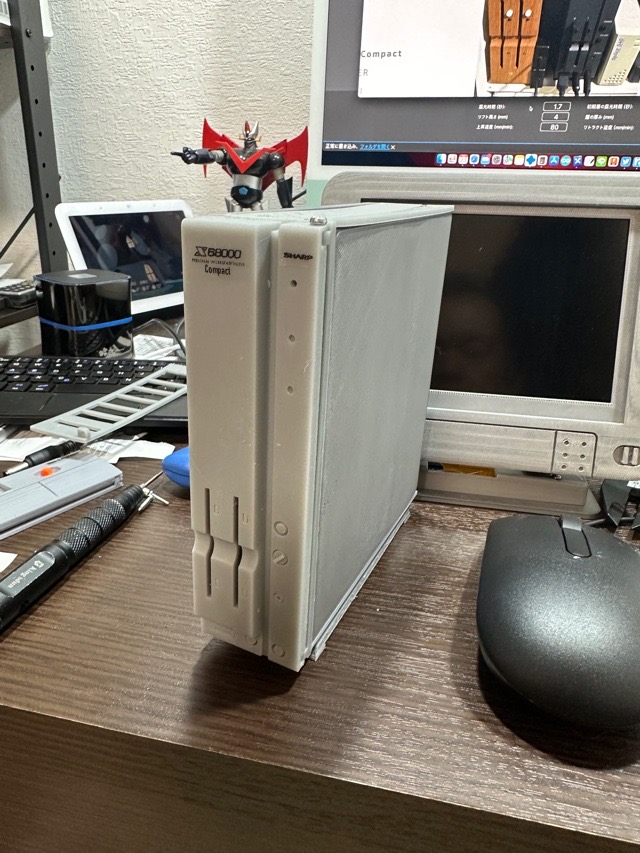
組み付けた状態。X68000Zもツートンなのでモニタもツートンにした。

フラットにした状態。はたして持ち歩くかはわからないができた方がいい。
最後にテプラでシール類を制作し貼り付けて完成。プラサフの上からでも静電スイッチが反応するので電源入りきり、ソース切り替え、音量調整などの操作も行える。
サイズ感もちょうどいい。
弊社はPCサポートおよび試作開発などを中心に業務を行っておりますが、4月より地元の学校にて教育支援を優先で業務を行うようになります。
それに伴い他の業務が行える日が限定的になります。
お客様にはご迷惑をお掛け致しますがご理解のほどよろしくお願いいたします。
自宅には2台のiMacが稼働しており、1台はM1iMac24、もう1台はiMac27 2017です。
iMac27の方はFusionDrive1TBで動作しており、容量的には充分なのですが動作が緩慢になってきたのでSSDヘ換装してみました。
ディスプレイを固定しているテープをピザカッターと呼ばれる専用ツールで切断すると中にアクセスできます。
iMac27のHDDは3.5インチを使用していました。
これを1TBのSSDに変更し本体の28GB程度のSSDとFusionDriveにすることでドライブが分かれることなく1台のドライブとして認識できます。
HDDを換装したiMacはHDDの温度検出機能が認識できなくなる場合が多いので、冷却ファンが誤動作で爆速で回るという現象が過去に出ていたので、専用の温度センサー付きHDDケーブルを購入したのですが、結果的にはiMac27 2017では不要だったようです。
冷却ファンが爆速になることもなく動作しました。しかし、すでに手配したので一応は取り付けました。
SSD化したiMac27はレスポンスも良くなりキビキビと動作します。
また、今回の換装で交換と復旧のスキルができたので業務にも活かせそうです。
MISORI-2を使ったMISORAの制御システムのダウンロード数(読まれている数)が2023年2月集計で3位になりました!
JRM Most Downloaded Papers, Feb. 2023
https://www.fujipress.jp/category/most_dl/
Vol.35では一番読まれている論文になっています。書いてよかったです!ありがとうございます!
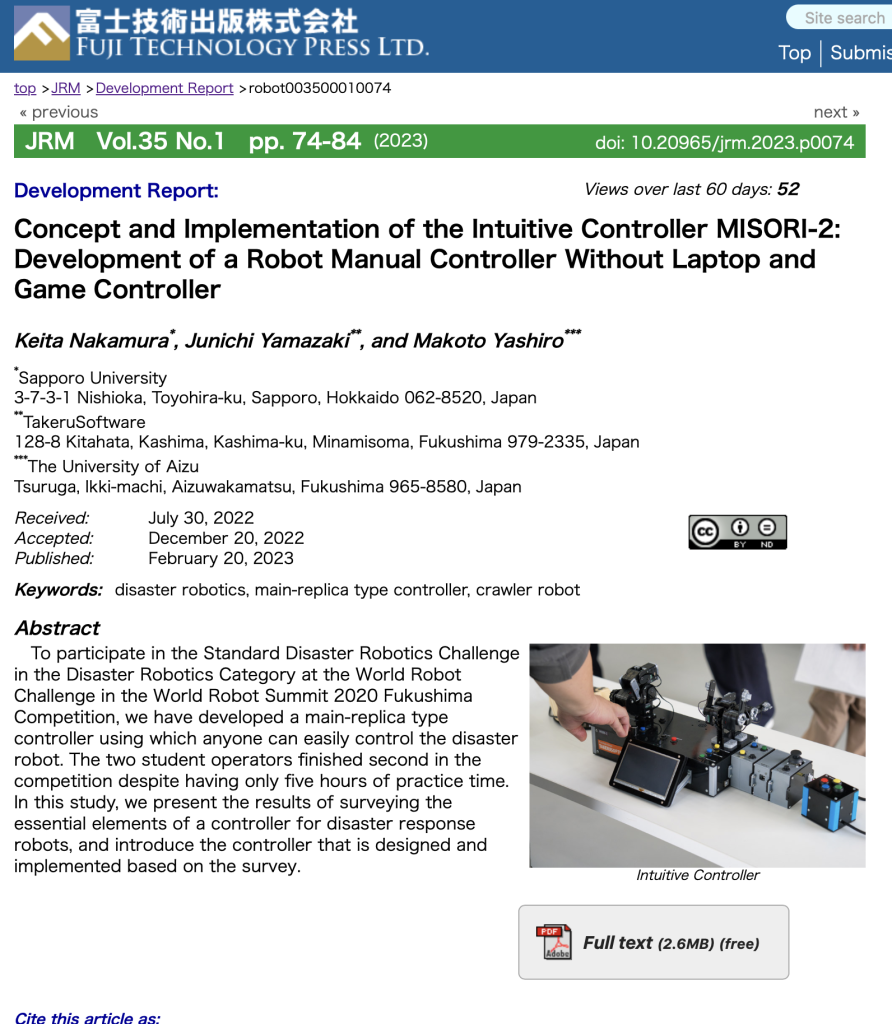
WRS2020でSTM部門で世界2位になったMISORAですが、そのコントローラにはいろいろな試みを盛り込んでいました。
その内容を技術論文としてJRM誌に投稿し査読を経て無事今月号に掲載していただきました。
執筆にあたっては英訳をしていただいた札幌大学の中村准教授、会津大学の屋代教授には大変お世話になりました。ありがとうございました。
掲載されたJRM誌はこちらからどなたでも無料でご覧いただけます。
最初DeepLでなんとかできるかなと思いましたがさすがに技術論文とかは全然で。。
また、論文を書いたことがなかったのでアドバイスを両教授より頂きました。
個人的にはCubeSwitchで特許出願をしたくらいに嬉しいです。
今回、結果を出せているのも堅牢で壊れないロボットを製造してくれた南相馬市の関係企業のお陰でもあります。
技術論文の要約を日本語で記載します。
「ワールドロボットサミット2020福島大会の災害ロボット部門「スタンダード災害ロボットチャレンジ」に参加するため、誰でも簡単に災害ロボットを制御できるメインレプリカ型コントローラーを開発しました。2名の学生オペレーターは、わずか5時間の練習時間にもかかわらず、大会で2位に入賞しました。本研究では、災害対応ロボットのコントローラーに必要な要素を調査した結果と、調査に基づいて設計・実装されたコントローラーを紹介します。」
操作経験のない人でもすぐに簡単に操作できるロボットのインターフェイス作りは今回の大会に参加するにあたり一番の目標に掲げたものでした。
競技会であるならば熟練のオペレーターがロボットの操作を鍛錬し参加すれば結果が出ますが、実際の災害現場というものはいつ起きるかわからないものに、鍛錬なしに担当者が対応しなければならない未知の現場になります。
アニメのヒーローのような天才パイロットが出てくることなどないので、いかに今いる人員で災害に対応できるかが鍵になると考えました。
MISORI-2はそのコンセプトで作ったロボットコントローラになります。
そしてちゃんと結果も出せました。
オペレータを2名にしたのも「優れたヒーロが1人いてロボットを使いこなす」わけではなく、「誰でもオペレータになれる」考えを含んでいます。
また、大会で唯一、ROSもパソコンも使わない制御系にしたのもそれらのトラブルに高校生(経験のないオペレータ)では対応できないと考えたからです。
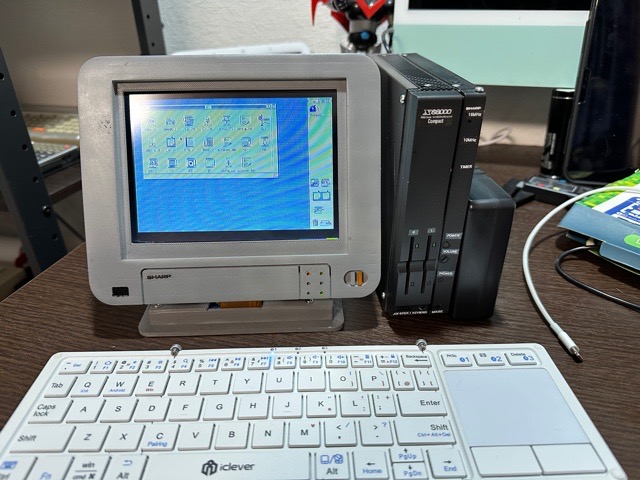
SHARPのX68000が会社員になりたての頃48回ローンを組んで購入した思い入れのあるパソコンです。
それがクラウドファンディングのエミュレーター機として令和に復活しました。
発表があった時に入手することは決めたのですがモニターは販売されないとのこと。
そこで、3DプリンタでCZ-600Dを模した液晶モニタを作成してみました。
大きいのでFDMの3Dプリンタで造形。なだらかな曲線が出ないので紙やすりで整形。
液晶は自宅に転がってたものをそのまま使用。

これを筐体に入れていきます。

造形したままなので面が汚いですが。。。これは後で塗装まですることにしました。
またついでにX68000XVICompactの筐体も作成。
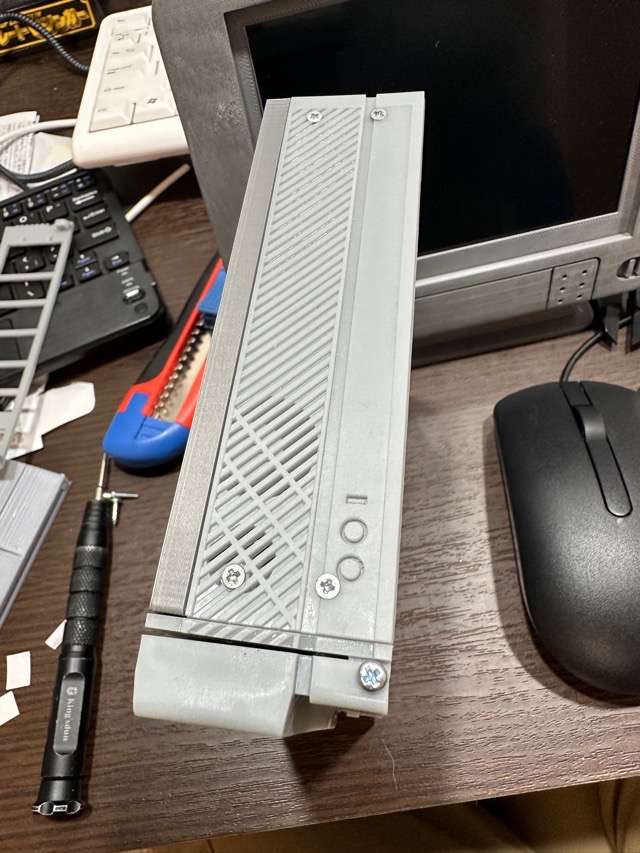
この2台は組み合わせて使用できます。最初にモニターを塗装しました。
X-BASICの画面はこんな感じに表示できます。

このセットをエアブラシで塗装しました。
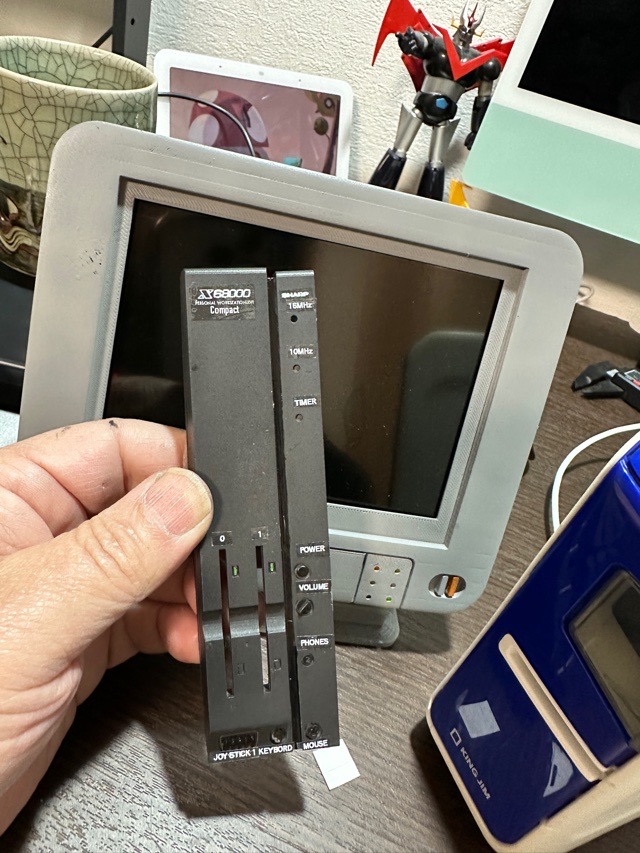
パソコンに組み付けて完成。
これで、X68000のエミュレーションはもちろん、通常のwindows11パソコンとしても使えます。
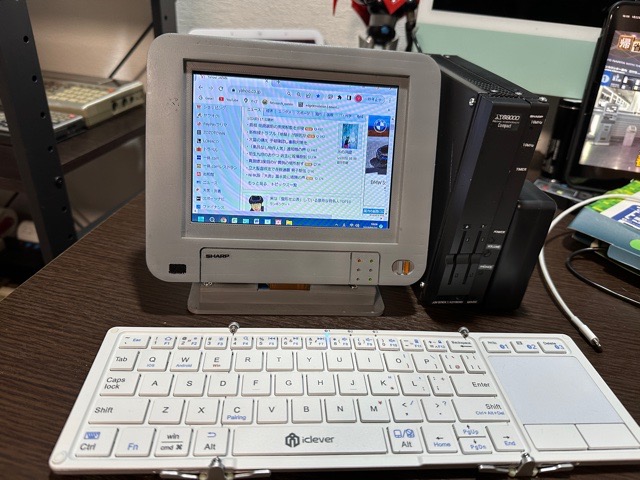
12Vのポータブル電源で5時間くらい運用できました。
写真を整理していたらいただいたものが見つかりました。
これは、会津大学の復興知授業の一環でMISORAの操作方法を小高産業技術高校の生徒に指導している様子です。
複雑な段差を越えて走行するためにMISORAのフリッパーを地上高の高い状態でしかも重心は低くする姿勢にして実験をしました。
もともと機体が規格ギリギリまで大きいMISORAなので他のロボットが苦戦するような段差も余裕で走行できました。

普通科の生徒向けの授業なのですが、みなさん理解が速く3時間も掛からずに自在にKAWAMATANKを動かせる様になりました。
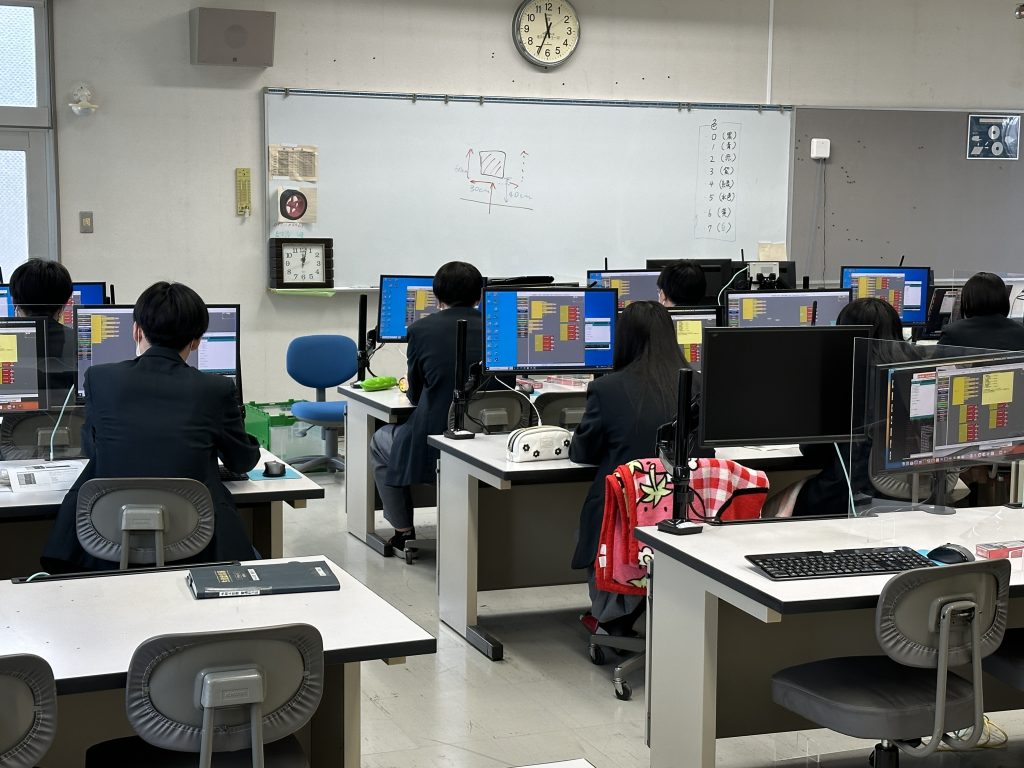
Ardublockを使ってまずはKAWAMATANKを机の上で動かす練習。
狭い机の上でも絶妙に旋回して動いています。
次は、障害物をタイマー制御で旋回して避ける動作を作ってもらいました。
これもいきなり4名がクリア!普通科で初めてのロボットプログラムを作って動かしたのだから凄いです!サブルーチンもうまく作ってプログラムを調整していました。
今日のMVPの生徒のプログラム動作です。
絶妙なバランスで障害物をクリアし、芸術点の高い戻り方をしています。
白河実業高等学校のマイコン制御の授業をRTFで行いました。
4時間程度の授業でしたが、さすがは電子科なのでプルアップ・プルダウンなどの用語も解説なしに話すことができます。
また、すでにArduinoを使った授業を行っているので戸惑うことも少なくArduBlockの授業を行うことができました。

Arduinoビギナーキットを使って、デジタル入出力、アナログ入力などの勉強をしてから、KAWAMATANKを使った授業を行いました。
4時間くらいの授業ではあまり複雑なことはできませんが、全員がタイマー制御による走行と停止を行い、中には、旋回などを含めたプログラム走行を行う生徒もおりました(すごい!)
こちらのいろいろな不手際があり迷惑をかけた場面もありましたが、みなさん楽しく授業を受けていただいたと思います。