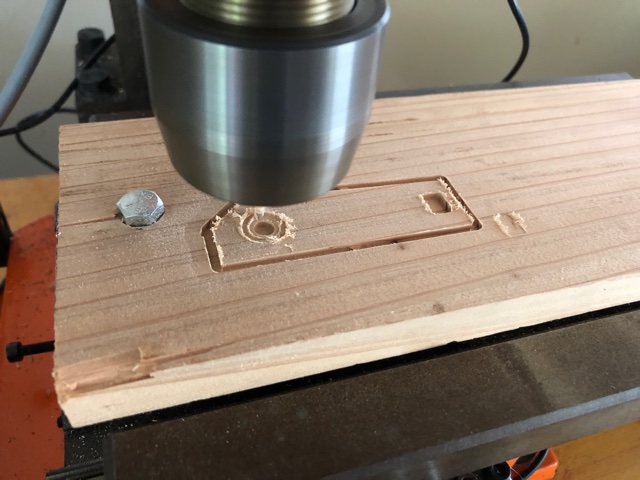
エンドミルを折らない様に木材でテスト切削をしてみました。
切り込みに対する移動量の設定がよくわかっていないので、これから調整してみます。

各種ソフトウェア開発および試作設計支援、パソコンサポート
エンドミルを折らない様に木材でテスト切削をしてみました。
切り込みに対する移動量の設定がよくわかっていないので、これから調整してみます。

バッテリーをリポに、本体の制御も改良しました。
地元のお祭りなどで使うかもしれません。
時間が取れたため、Fusion360を使ったCAMの確認作業をしています。
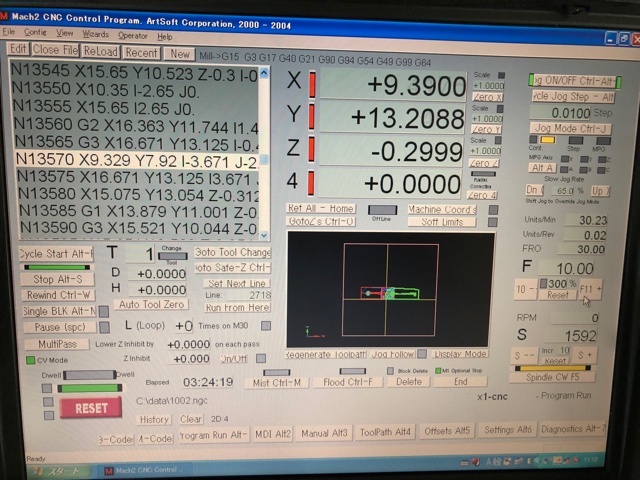
弊社卓上NCフライスはWindowsXPとMACH2の組み合わせという古い組み合わせですが、CAMに関しては1年ほど前にFusion360で軽く動作試験を行ったのみだったので、その復習もかねて作業してみました。
Fusion360のCAMにはプロファイルとしてMach2Millがあるのでそれを使いましたが、加工途中でエラーで止まるため別なプロファイルを利用しました。
次は、切り込みがなぜか全体的に0.5mmほど浅く設定されるため高さ設定でボトムの高さを-0.5mm調整し、現在動作確認を行っております。
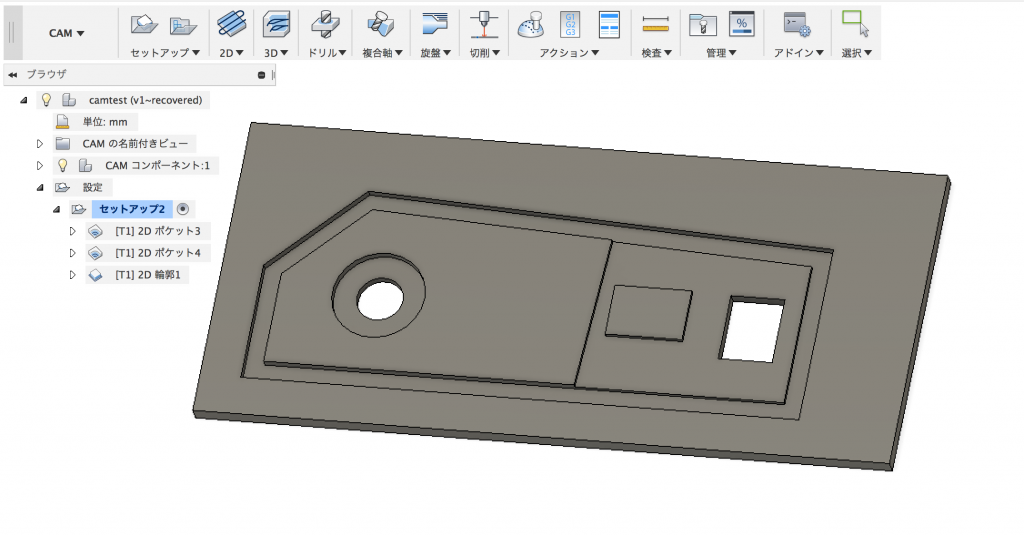
このような感じで板を切る出すようなモデルを作成しました。
うまく使いこなせればアルミなどを切り抜いてロボットの部品も作成できると思います。
 不在かどうかわかりづらいので、事務所の入り口に看板をつけました。
不在かどうかわかりづらいので、事務所の入り口に看板をつけました。
この場所は間借りしているので、工場の人も作業にくるのですが鍵が開いているかどうかわかりづらいと思い、看板を掲げることにしました。
この看板が出ているときは事務所内におります。
ない場合には施錠と警備をセットして外出中です。
ロボット分科会のセミナーは6月末に終了しました。
最終的にはクローラーアームを追加し、リモート操作で動くところまで行いましたが、駆動用で使っているモバイルバッテリーに不具合が判明。
取り回しの良さでUSB給電のものを購入しましたが、見直さないとだめでした。
本当なら複数台数つかった競技などをしたかったのですが・・・。
セミナーでは普段、カッターナイフやヤスリなどを使わない業務に携わっている方々が、実際に3Dプリンタで成形された部品を手直しして組み付け、プログラムを書き込んで・・・と作業しておりましたので、手元がおぼつかない方もいましたが、全員、最終形態まで組み立てが行えてよかったです。
初めてのセミナーということで、準備物の多さや、授業のボリュームなど勝手のわからないことだらけでしたが、皆さんのご協力で終えることができてよかったです。
去年製作したドローン用ジンバルカメラを
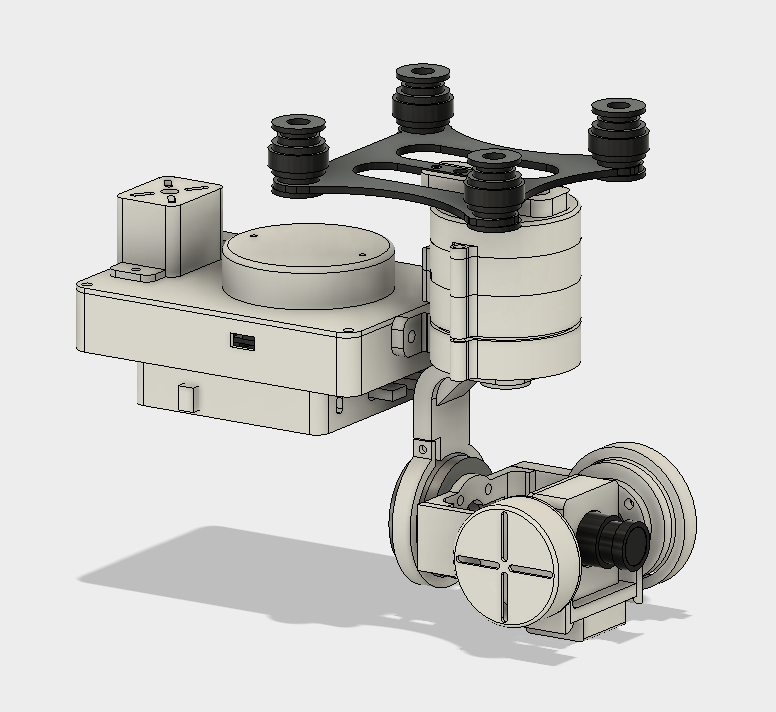
防塵仕様に再構築しました。

駆動系と制御もワンパッケージに。

各自、自分で組み立てたクローラーロボットの制御を行うプログラムを作成しています。
この時は、プログラムを穴あきで用意して、「どこに何を埋めるか」を考えていただきました。
単に用意されたプログラムを書き込むだけでは、ただの作業なので何も考える部分がありませんが、全体の流れや使うコマンドなどがわからないと適切に埋められないので皆さん、真剣な表情で考えていました。
ネットで見つけた方法が古くてswiftがよくわからなかったけど、なんとかなったのでソースを貼っておきます。
let ぼかし具合 = 10.0 ; // デフォルト 10.0 数値が大きいほどぼかし効果が高くなります。
let pbCopy = true
import Cocoa
import CoreImage
let pb = NSPasteboard.generalPasteboard();
let readData = pb.dataForType(NSPasteboardTypeTIFF);
if( readData == nil ){
print(“クリップボードへ写真・画像をコピーしてください。”)
exit(1)
}
var ciクリップボードイメージ = CIImage(data: readData!)
let nsimage = NSImage(data: readData!)
let filter = CIFilter(name:”CIGaussianBlur”)
filter?.setDefaults()
filter?.setValue(ciクリップボードイメージ, forKey:”inputImage”)
filter?.setValue(ぼかし具合, forKey:”inputRadius”)
let outputImage = filter?.outputImage
let cropRect = CGRect(origin: CGPoint(x:0,y:0), size: ciクリップボードイメージ!.extent.size)
let bmImg = NSBitmapImageRep( CIImage:outputImage!.imageByCroppingToRect(cropRect))
if( pbCopy ){
pb.clearContents();
pb.setData(bmImg.TIFFRepresentation, forType: NSPasteboardTypeTIFF)
}
セミナーで使用するクローラーロボットの遠隔操作プログラムを作りました。
動作は以下のリンクから確認できます。
プロトタイプ製作をするときに、実際の製品のサイズ感を確認するために1/6スケールで造形します。
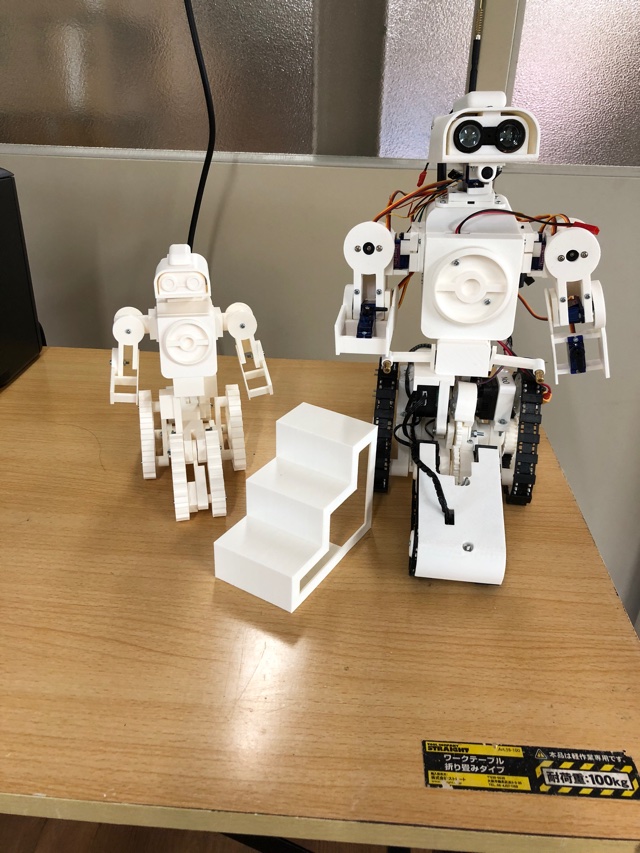
動作する実物は実際のサイズの1/3ですが、階段を超えるのが厳しかったので、1.3倍したものを1/6モデルにしました。
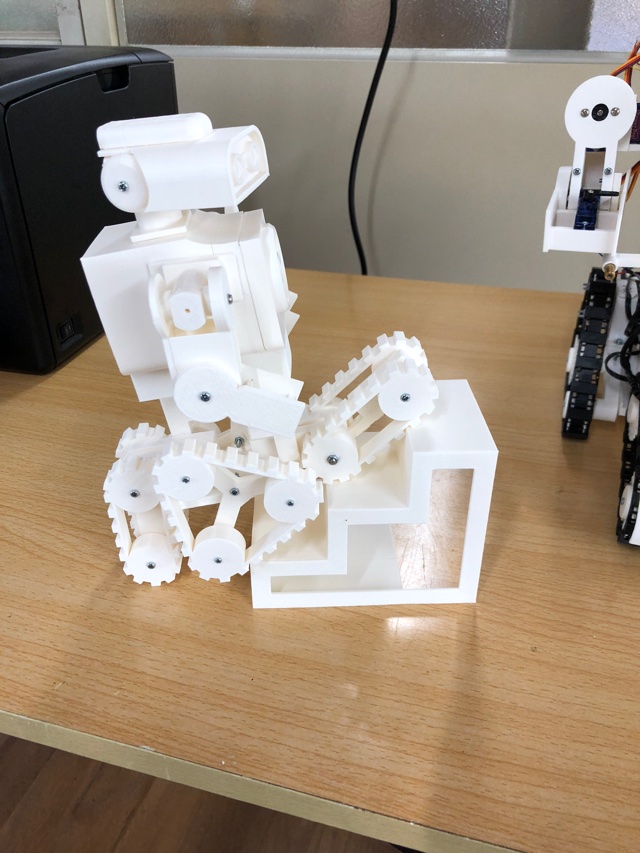
1.16倍くらいでも良かったかも?大きく感じます。
さて、なぜ1/6で作るのかというと、ちょうどいいフィギアが1/6なのでそうしてます。
このフィギアは身長180cmを想定していて約30cmあります。
このフィギアと造形物のスケールを合わせておくと、実際のサイズ感を掴むことができます。

うーん、かなり大きいロボットになってしまったなぁ。

実際にWRSを考えたときにこれほどの上半身は要らないですね。
また、センサーも制御も実際は遥かに小さいですし。
