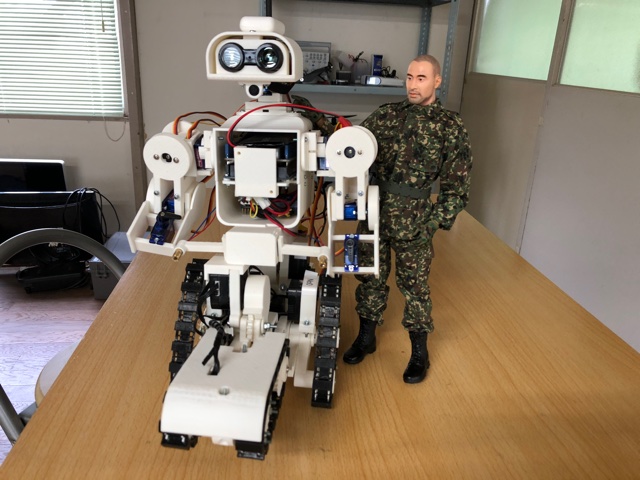
事務所に打ち合わせなどの来客時に使えるテーブルがなかったので持ち込みました。
1/6フィギアとロボットの記念撮影。
このサイズの場合、ロボットの身長は2mを超える感じです。

各種ソフトウェア開発および試作設計支援、パソコンサポート
事務所に打ち合わせなどの来客時に使えるテーブルがなかったので持ち込みました。
1/6フィギアとロボットの記念撮影。
このサイズの場合、ロボットの身長は2mを超える感じです。
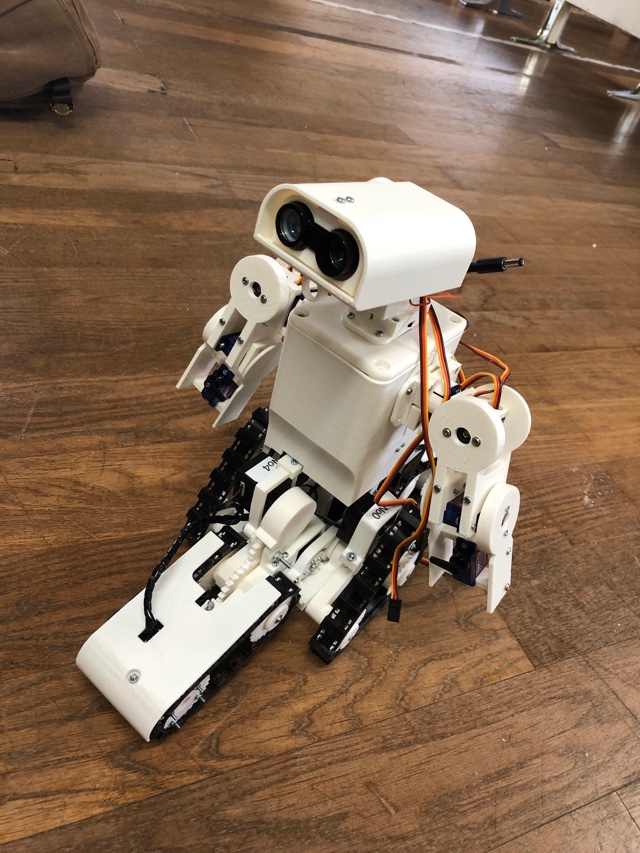
上半身の変更がうまくいき、走行に支障もでなくなったので、頭部のカメラユニットを収納するケースを造形しました。
カメラは単独で接続することもできますが、既設のwifiルーターにつなぐこともできます。
先ほど、草むらと砂利を走行させましたが、安定して走行できました。
バランスは悪いままです。没かな。
これならいけそうな気がする。
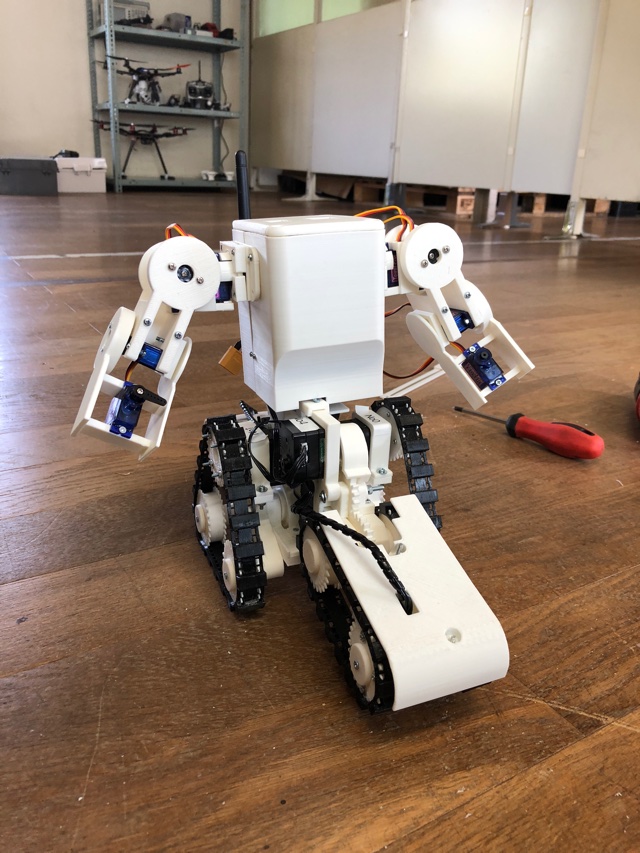
ロボットの背中に背負う感じでバッテリーパックをつけてみましたが、これが大失敗でした。
上半身が重くなりすぎてバランスが悪く、メインクローラーの旋回動作をさせると姿勢を直すことができません。
要素開発をしている間は問題になりませんが、ロボットが完成に近づいてくると重さとの戦いになります。
本日は午後1時半からロボット分科会のセミナーでした。
今回はクローラーロボットの
・前後動作に旋回動作を追加
・ミサイルを発射する動作を追加
これらを、参加者が自分たちで考えてプログラムを書いてみるという作業を行ってみました。
arduinoなのでincludeでservo.hを読み出せば、servo変数を設定し、ピンをattachして、writeで位置決めができます。
模型用サーボは信号幅で位置決めをしていること、ボリュームをつないでアナログ入力した時に、繋ぐデバイスによっては入力値が0〜1023段階では入力できないので、その数値を演算で丸めて使う方法などを説明しました。
みなさん、早々に目的の動作を行うことができました。
4回目のセミナーになると、プログラムを読みだして書いて、シリアルモニタで結果を確認してくださいというだけでちゃんと操作できるようになります。
まったくarduinoを知らない(というかマイコンもしらない)方々のためのセミナーですが、回を重ねるごとに成長を感じることができました。
移動用の下半身の動作と異なり、上半身はある程度、定形の動作を行うようになります。
そのためには各軸を個別に設定して、パターンとして記録できるアプリがあった方が良いのでwindows用アプリを製作開始しました。
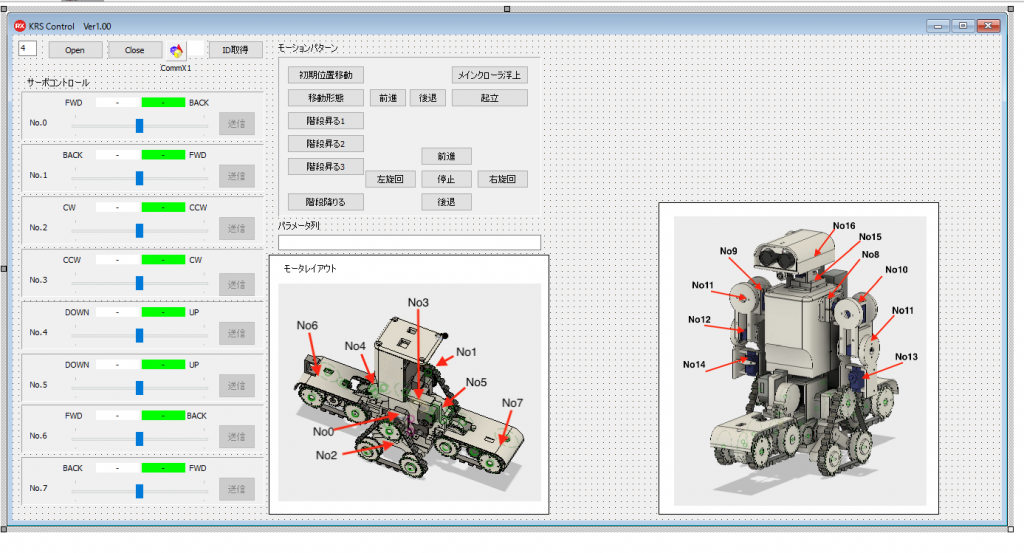
図のような感じで、各軸の番号を振った絵を見ながら、実際に動作させてパターンデータを生成します。
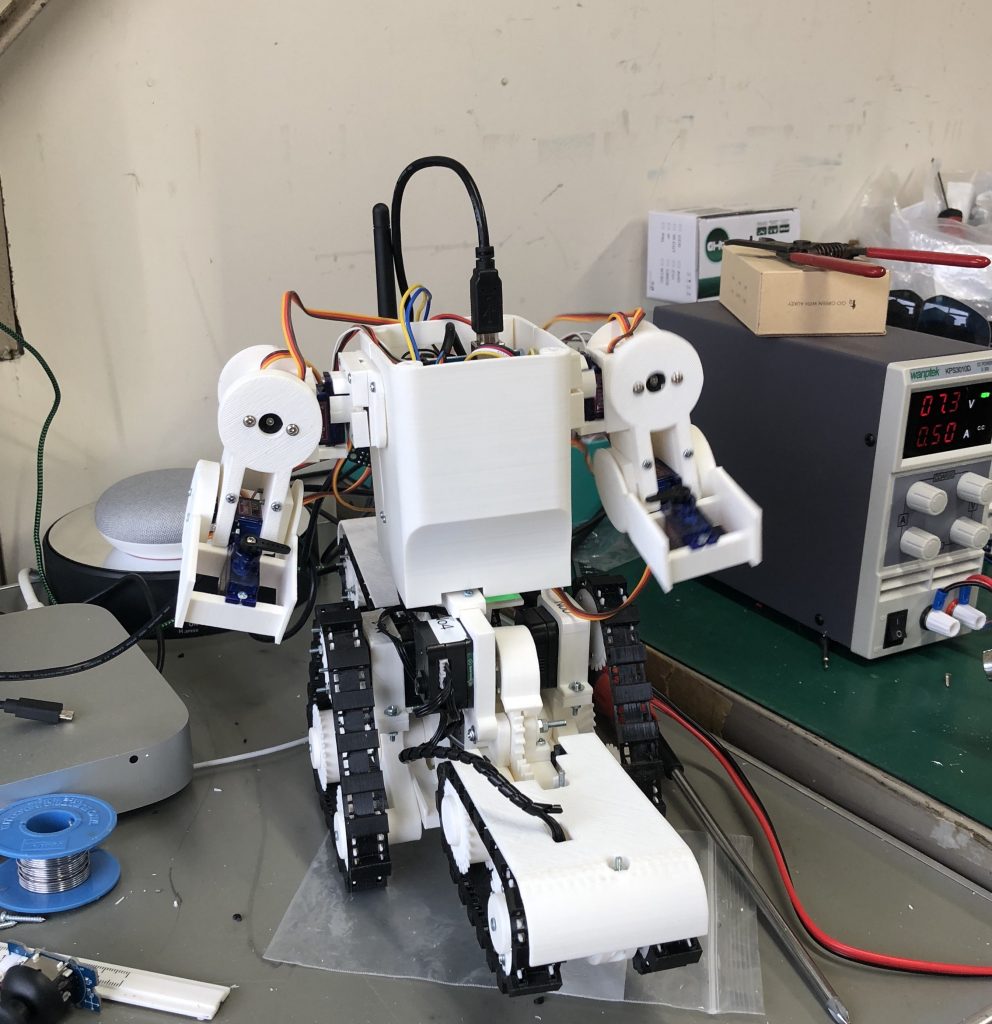
腕の動作を行えるように配線をし、サンプルプログラムを入れてみました。
ここをクリックすると動画が再生されます
腕の振りだけを見るととても力強いですが、特に倍力機構を備えておらず、腕そのものが軽いのでそう見えるだけです。
力はありません。
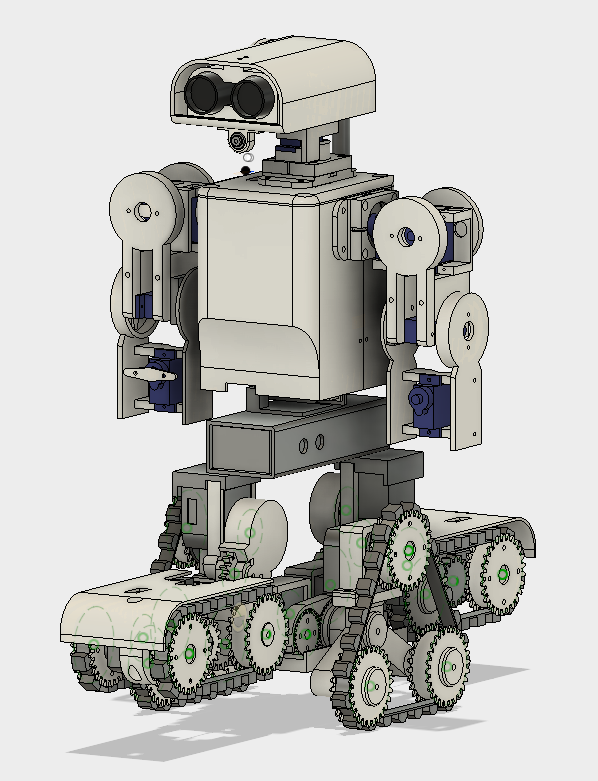
ロボット本体にはセンサを搭載する場所がないので、頭部ユニットを設計。
両椀に頭がつくと、だいぶアニメのロボットっぽいイメージになります。
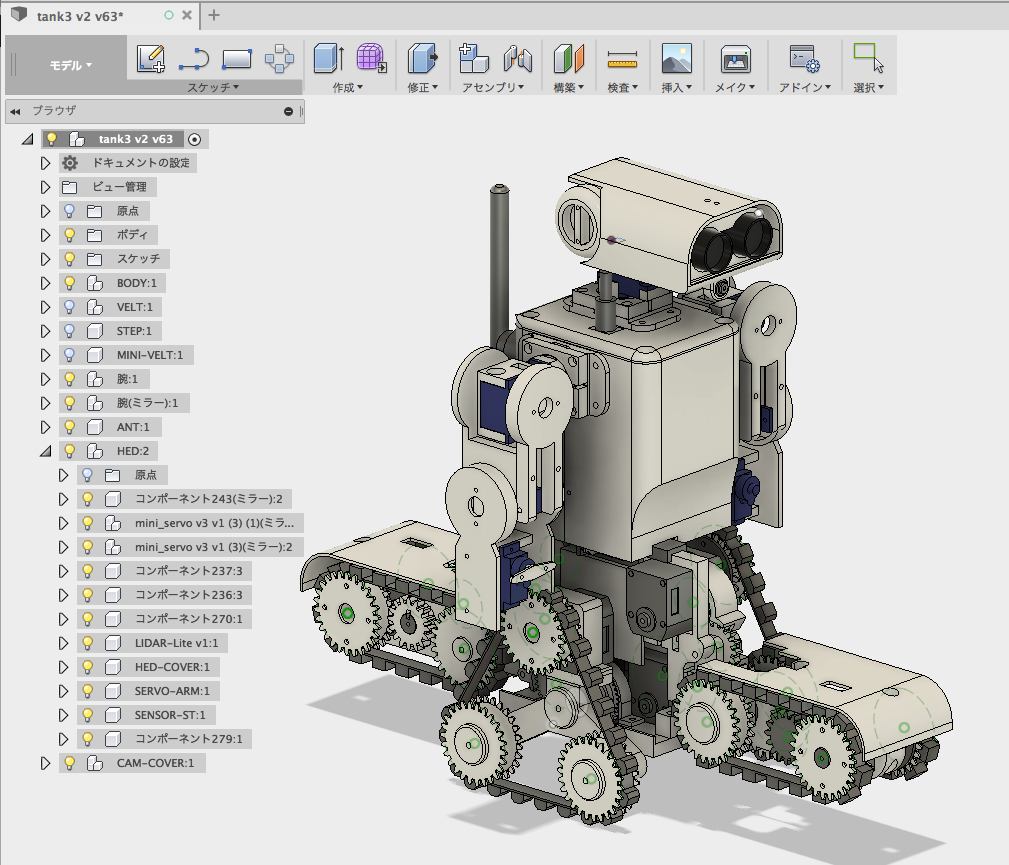
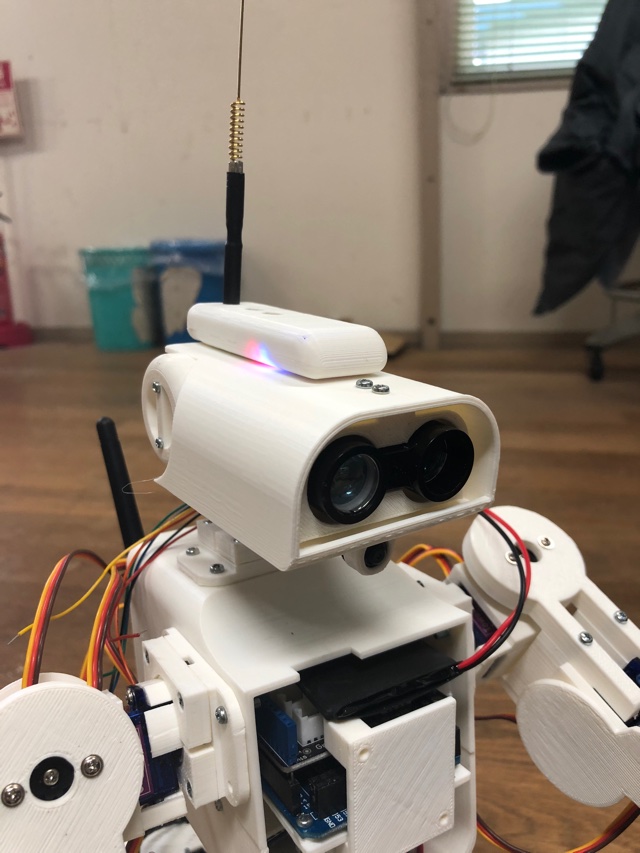
40Mまで測定できるレーザー測定モジュールを頭部に搭載。
2軸のサーボで旋回と上下に振ることができます。
真上を向けるので、天井までの高さを計測したりできると思います。
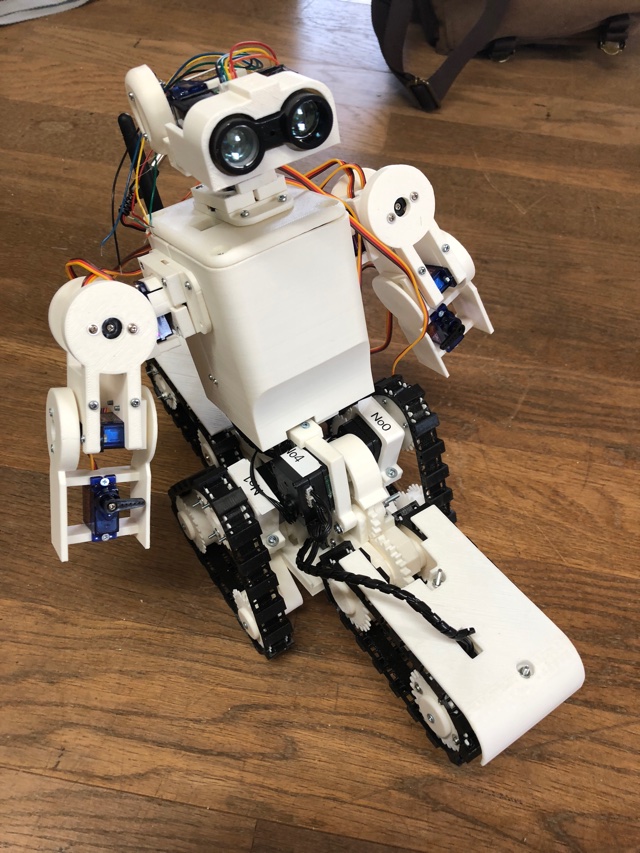
頭部カバーを取り付けた状態。
顎の部分には極小のwifiカメラユニットを搭載できます。
送信モジュールなどはこの頭部カバーに収納できるように、追加カバーなどを設計しないといけません。
いきあたりばったりで現物を見ながら設計していますが、なんとか形になってきています。
南相馬市には、ロボットテストフィールドという場所が作られ、各種ロボットの動作試験をより現実的なシュチュエーションで実験できるようになる予定です。
そこで試験を行ったり検証を行うだけでは、地元企業が潤うことはなく恩恵を直接受けることができません。
私は南相馬ロボット評議会の分科会であるロボット研究会の副理事なのですが、昨日、役員会があり出席しました。
そこでロボットを作る話になった時に、会員から「部品の入手が難しい。通常の産業機械とは違うニーズの製品を探すのが大変だし、あっても海外のものとかで容易に入手できない」という話が出ました。
まったくその通りで、例えばクローラーロボットのベルト1本でも任意の寸法のものを入手するのはまず無理で、市販のもので似通ったものを選んでくるのが関の山です。
そのときふと思ったのですが、今後、いろいろなロボット産業が立ちあがってきたときに、主要なモーターやドライバなどは大手が製造を行うとして、その周辺のまさにクローラベルトやギヤボックス、リンク機構などを地元企業で製品化し、会津大学と産総研で推進しているロボットミドルウエアで使えるモジュールをそのまま使えるようになるとニッチな市場である程度、産業化できないかなと。
今でもマイクロハンドなどのレベルなら県内企業で生産しているものもありますが、どれも単発的なモジュールである場合が多く、体系的なロボットモジュール製造をしているところは国内でそうないのかなと思いました。
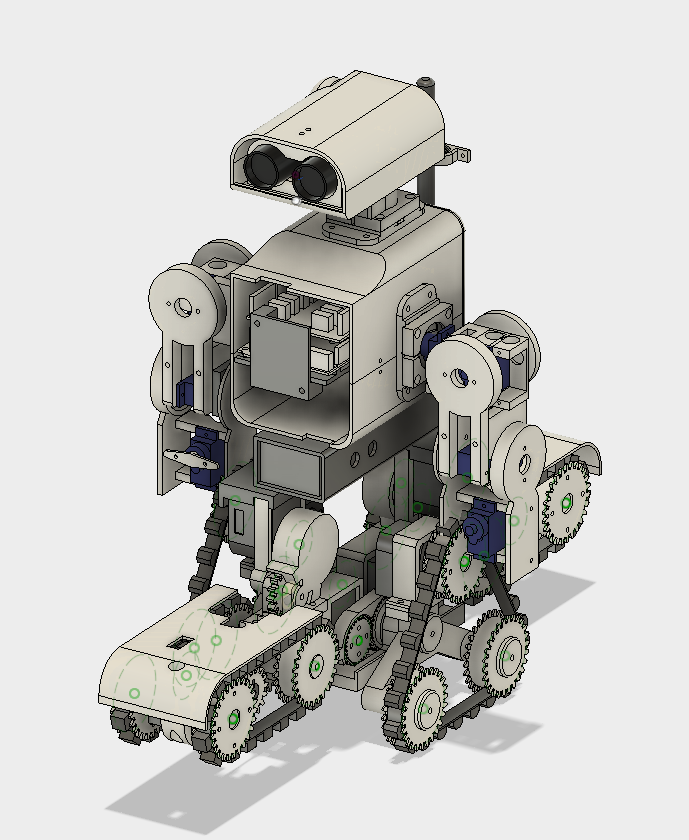
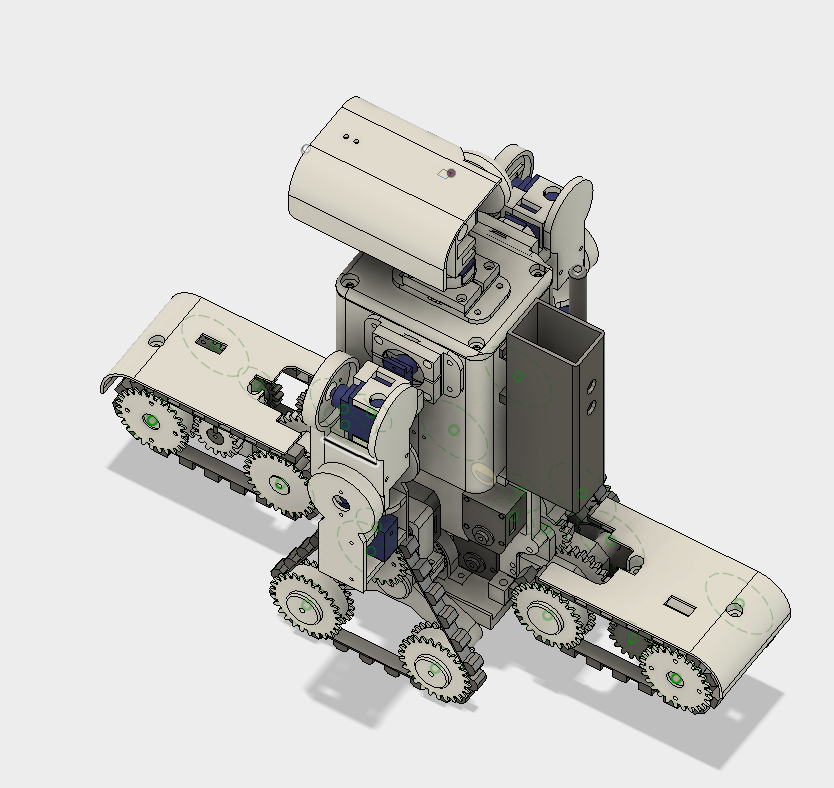
出力した腕の部品を組み立ててみました。
双腕になると人っぽくなりますね。私の世代でいうとゲッター3かガンタンクってところでしょうか。
階段に載せてみました。
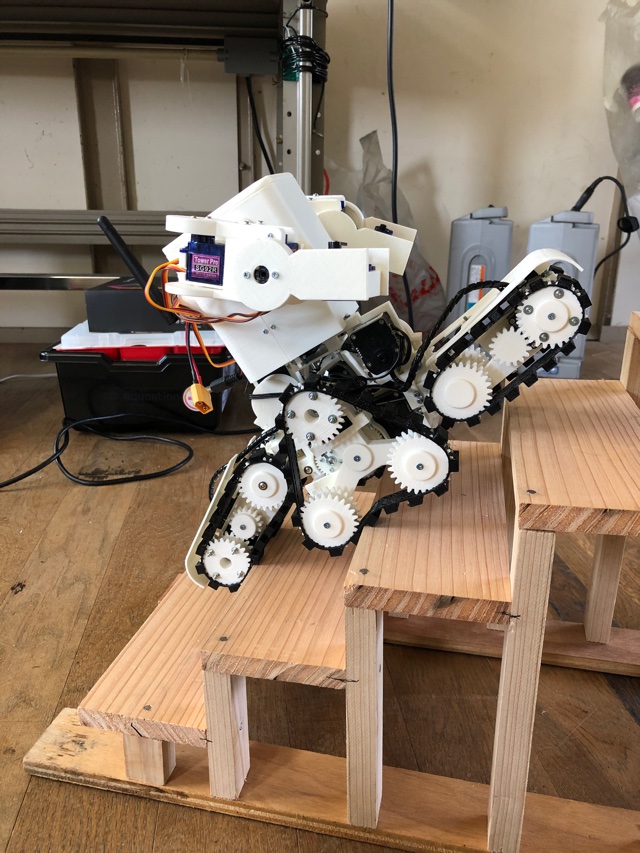
後ろのクローラーにかかる負担がすごそうです。
階段を上ることに特化するのなら、このクローラーは前と同じサイズ&出力である必要はないのでもっと大型化かつ長くしてもいいかもしれません。