実際にモーターの配線を始めると、駆動ギヤにケーブルが巻き込まれないように取り回しを検討しなければなりません。
制御盤の様に配線が動かない場合には設計段階からケーブルの取り回しを構想できますが、ロボットのように動くものの場合はケーブルの剛性やたわみ具合により試作をして実機で確認した方がいい感じで取り回せると思います。
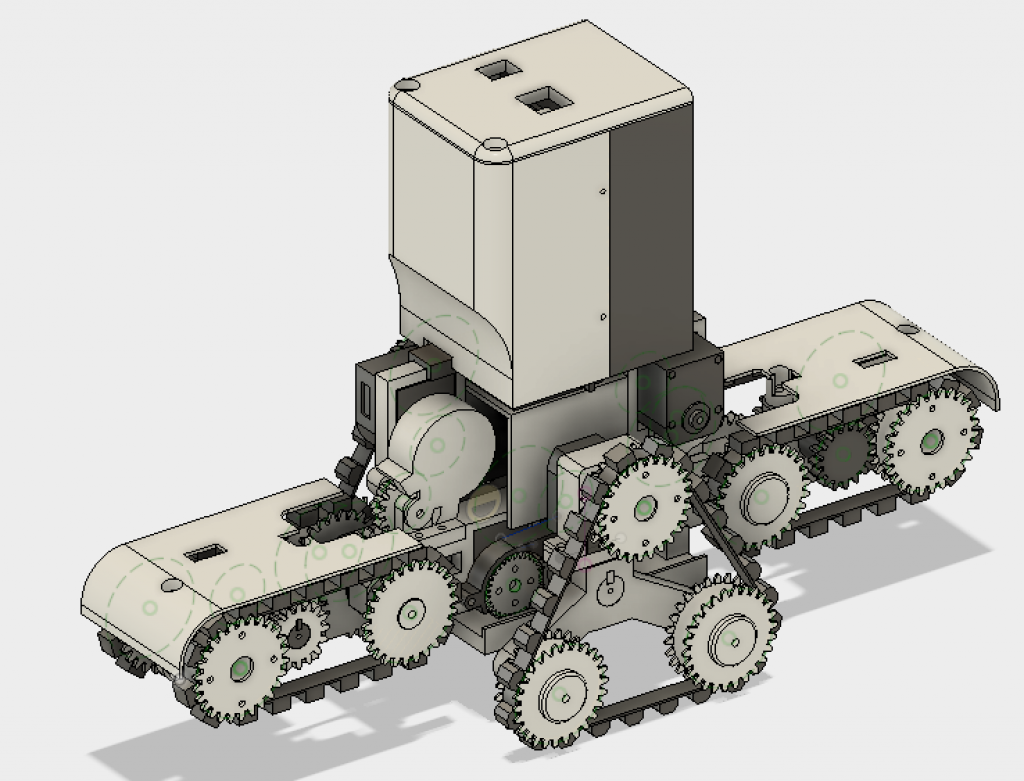
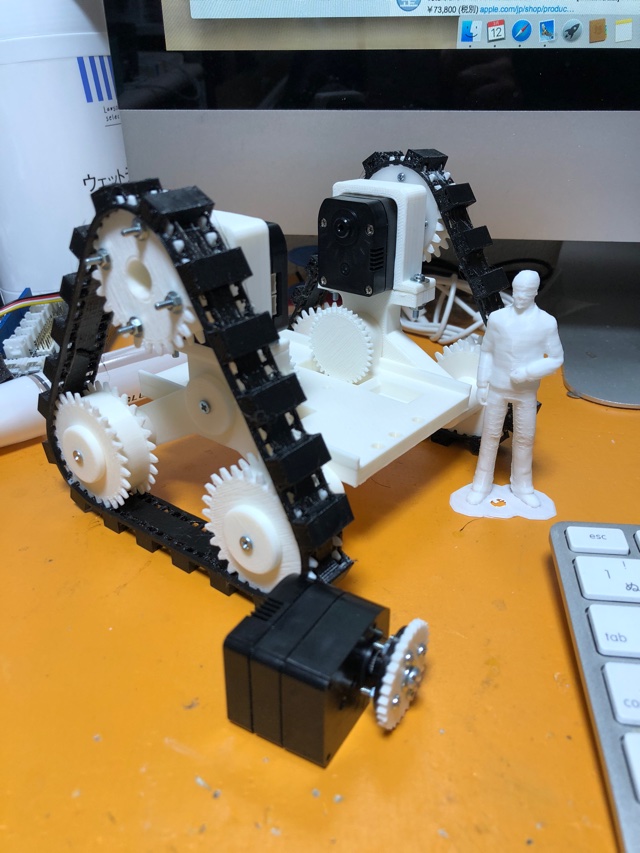
現時点で試作したロボットの配線を行い、使用するマイコンボードを搭載してケーブルの取り回しを考えつつカバーの設計を行いました。
カバーがつくとロボットらしくなりますね。

各種ソフトウェア開発および試作設計支援、パソコンサポート
実際にモーターの配線を始めると、駆動ギヤにケーブルが巻き込まれないように取り回しを検討しなければなりません。
制御盤の様に配線が動かない場合には設計段階からケーブルの取り回しを構想できますが、ロボットのように動くものの場合はケーブルの剛性やたわみ具合により試作をして実機で確認した方がいい感じで取り回せると思います。
現時点で試作したロボットの配線を行い、使用するマイコンボードを搭載してケーブルの取り回しを考えつつカバーの設計を行いました。
カバーがつくとロボットらしくなりますね。

南相馬市内の企業に安倍首相が訪問されました。
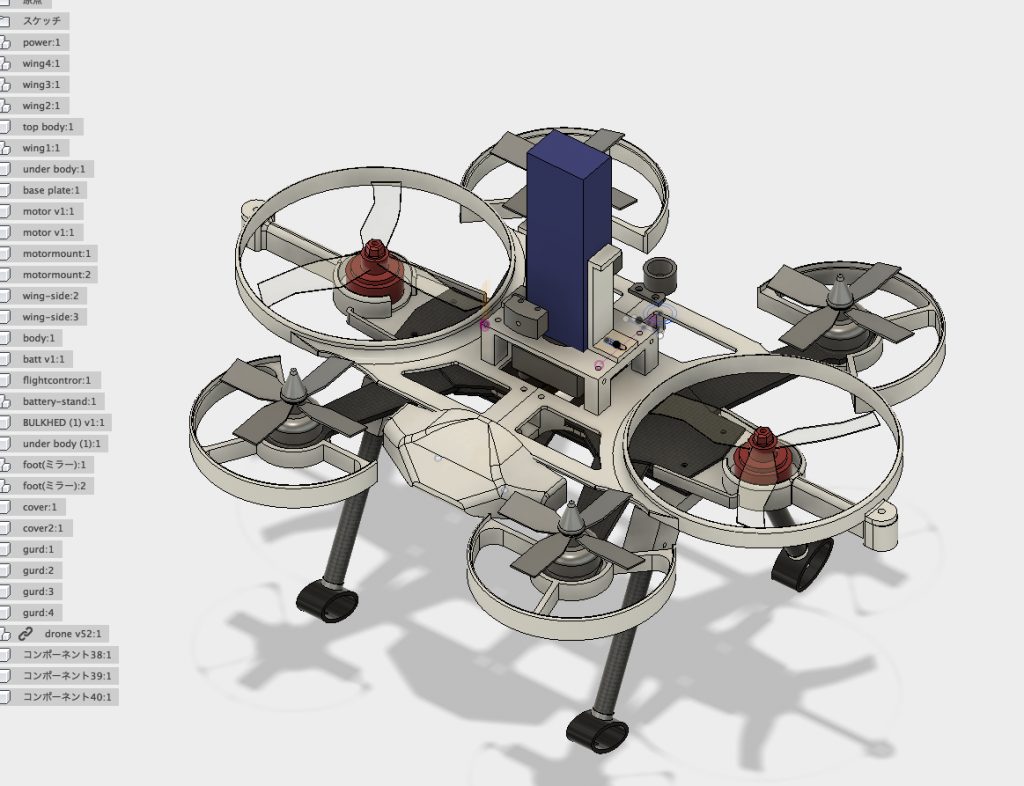
そこで現在、IHI殿と開発をしている災害対応ドローンの模型を展示していただきました。
この模型は実際に飛ぶモデルで、フライトコントローラのパラメーターなどを調整しております。
弊社は今回のIHI殿が製作している災害対応大型ドローンの物資保持機構の制御とカメラシステムの制御&メカ開発を担当いたしました。
弊社は外注のため、表舞台に出ることはありませんがこれまで行ってきた業務の成果を県知事を始め復興大臣殿にも見ていただけて大変光栄に思いました。
IHI殿が開発している大型ドローンは首相官邸のHPから見ることができます。
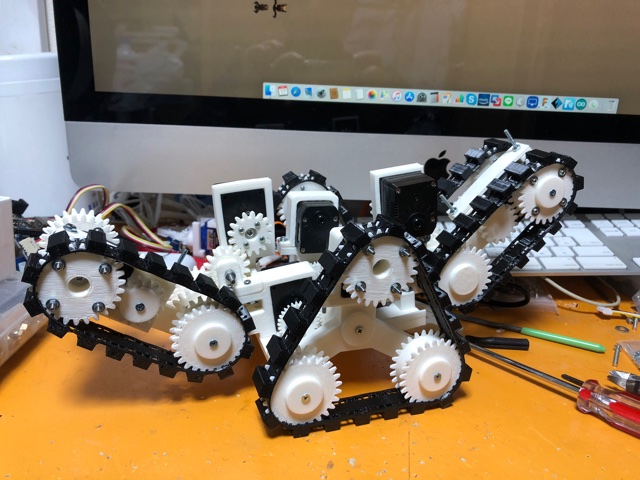
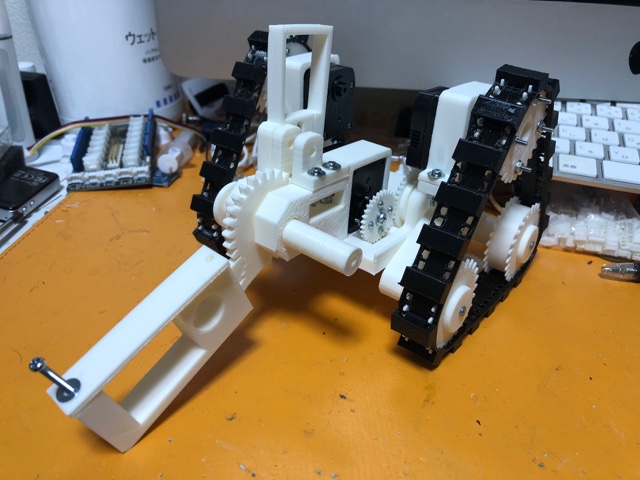
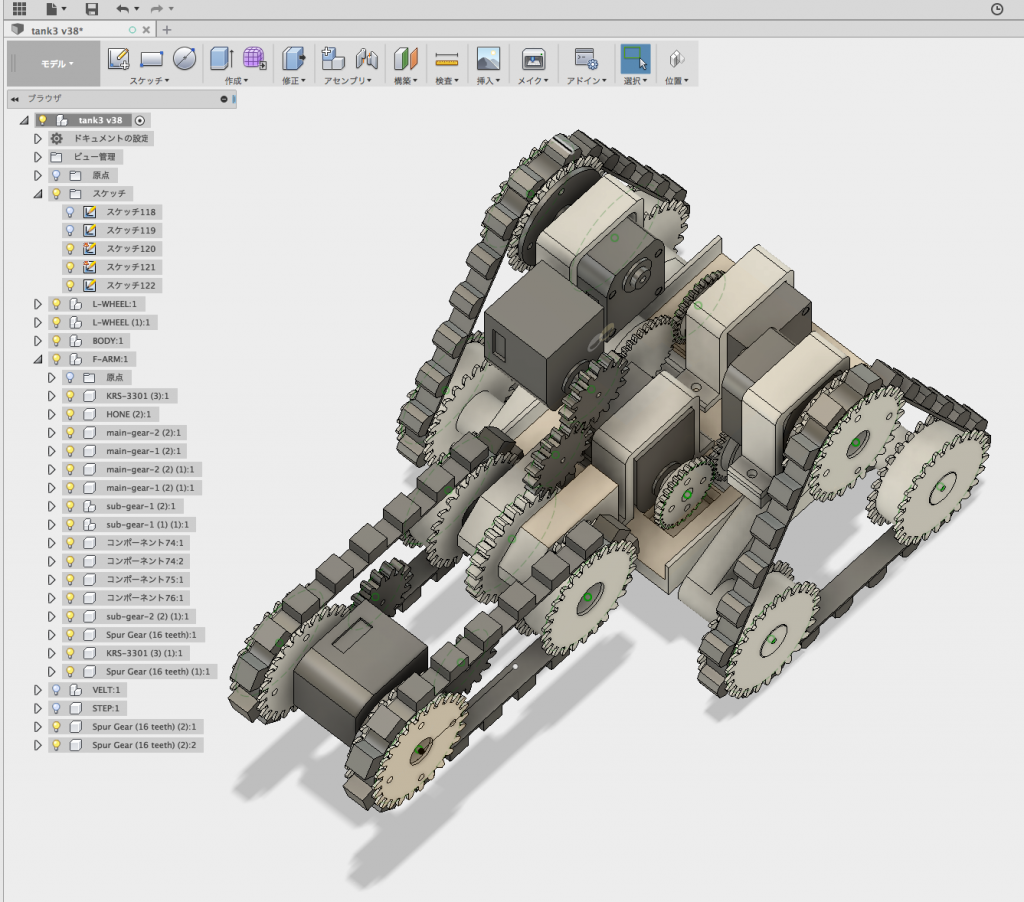
前後アームクローラーを取り付けて、全体の仮組みが終わりました。
あとは、サーボの設定用アダプタが届けば軸の設定ができるようになります。
今回使われているサーボは初めて使うので覚えることが多いでしょうね。
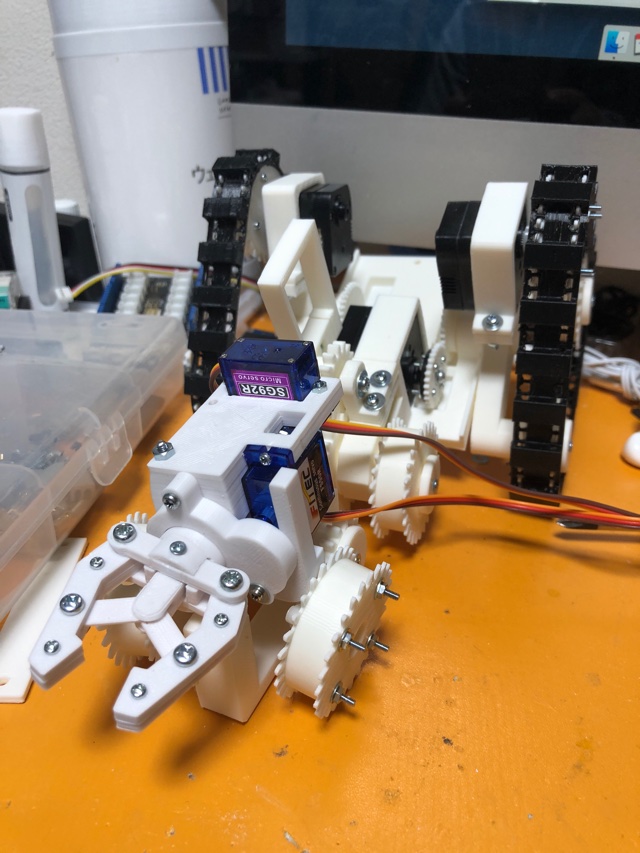
実際に造形をして組み合わせて強度や動作の確実性を確認します。
ABSなのでアルミなどの材質に比べると弱いため、板厚を増やしたり形状を見直したりして強くしていきます。

回転とチャック動作ができるので、手首のスナップの旋回を追加すれば、フロントアームクローラーをハンド機能付きのアームとして流用できそう。
本体のクローラー部ができて来たので、アームクローラー部の造形を開始。
サーボ が3つ足りなくて組み立たない。
全部で9個のサーボ が必要になります。
3Dプリンタで作る模型はあくまで模型なのでベアリングなどの軸受を省いて設計しています。
樹脂なので食いつくこともなく潤滑できるので。
ただし、精密な部品はできませんのでどうしても組み合わせるとガタが出ます。
そこは機構でカバーする形にしないときついかも。
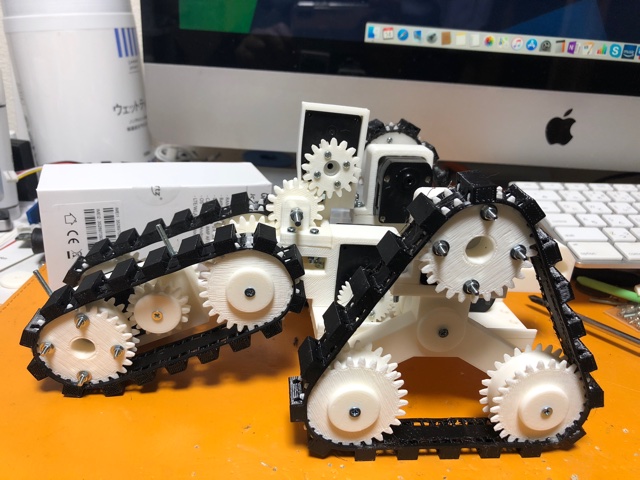
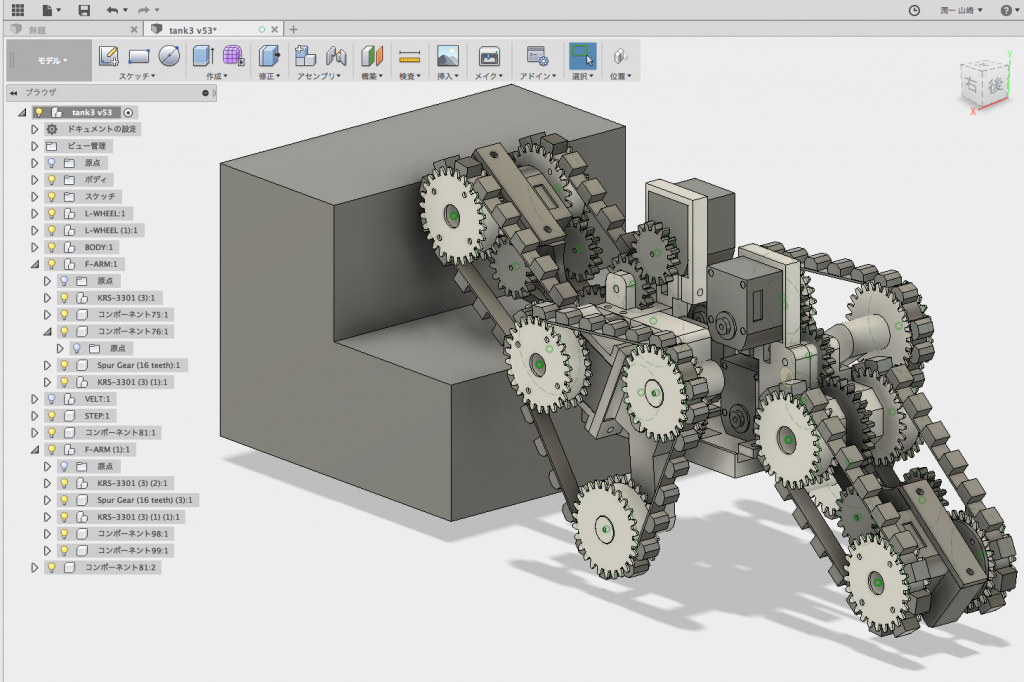
この模型の場合、クローラーユニットを一箇所で受けてますが、曲げモーメントがかかった時に容易にたわみました。
なので、2点で荷重を受けれるように改造した方が良いことがわかります。
モデルを造形するとそう言った弱点も知ることができます。
弊社も開発に協力している協栄精機のドローン向けキャリアユニットを安倍総理が視察に来られたそうです。
生産設備メーカー「協栄精機」でドローン(小型無人飛行機)を前に関係者らと話す安倍晋三首相
手前にある2機のドローンは、実際の数10分の1スケールで似た形に再現し、飛行できるように弊社で作りました。
黒い方は実機と違い2つのプロペラと姿勢制御翼だけなので竹とんぼのようにしか飛ばせませんでしたが、白い方は市販の4つのプロペラのドローンを6つに改造したものなのでちゃんと飛びました。
模型とはいえ、真似してみるとどれだけ難しいことにチャレンジされているかよくわかります。
空を飛ぶものを作るのは本当に大変です。
・アームを下ろした状態
・リアアームをあげた状態
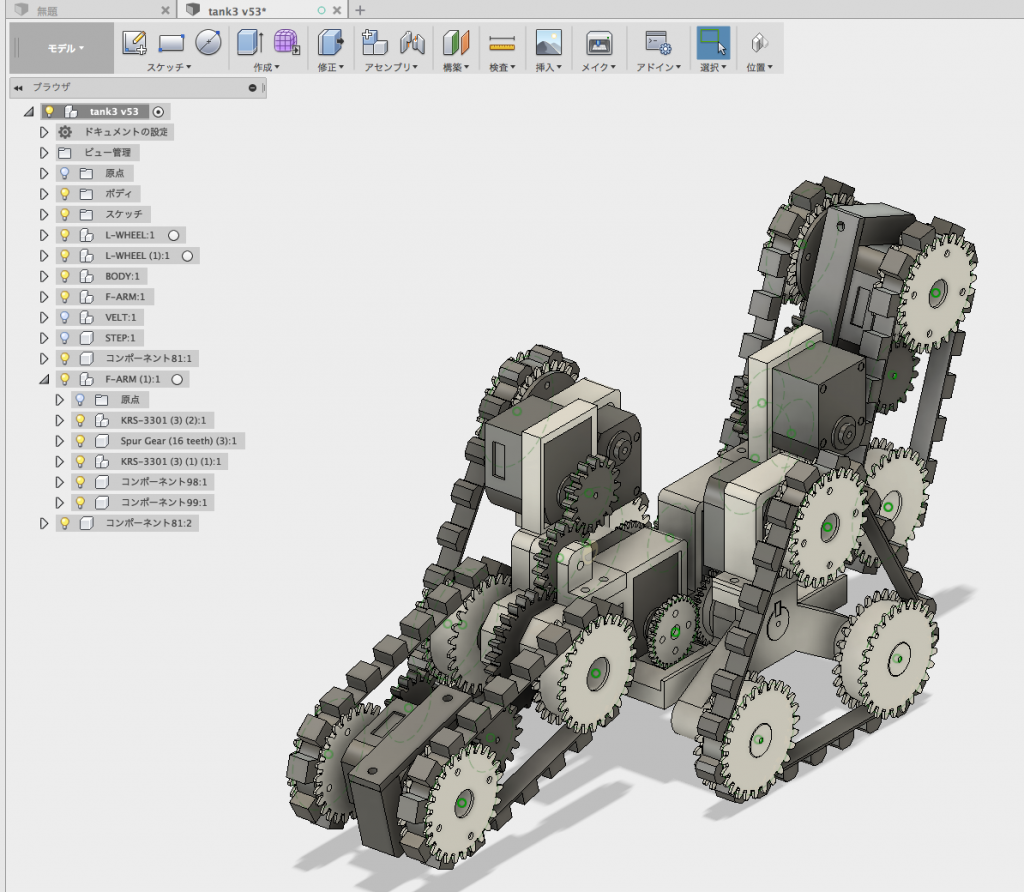
・両方のアームをあげた状態
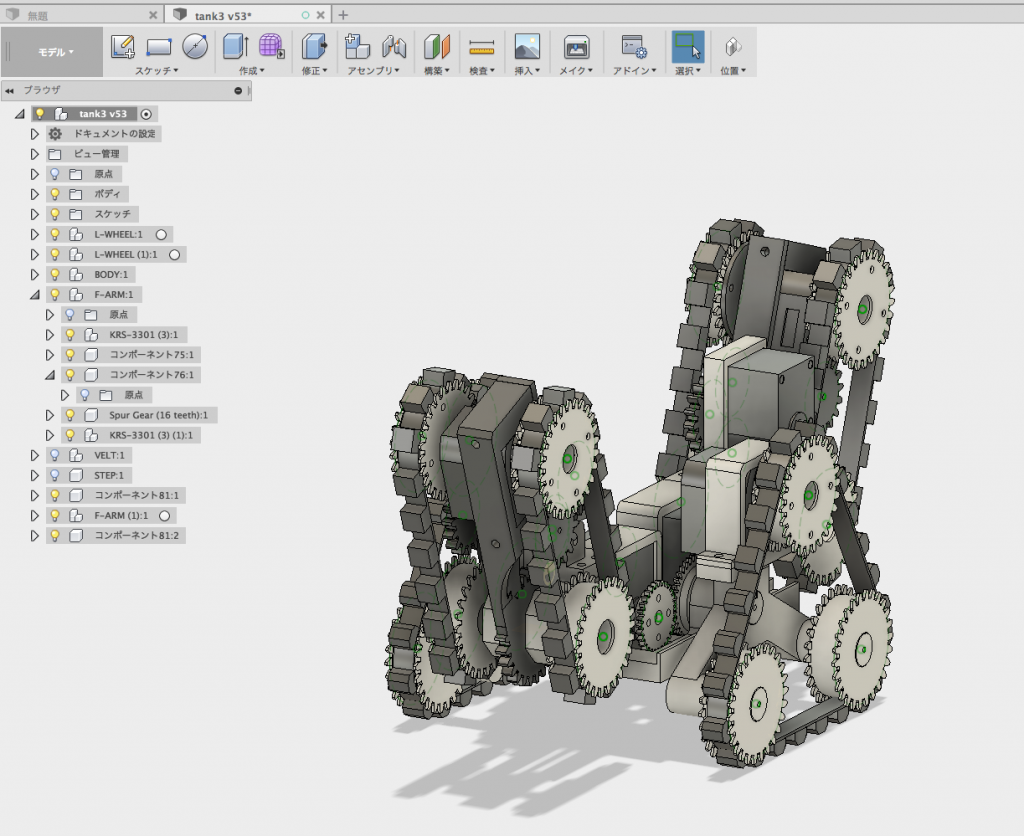
・階段を移動する時
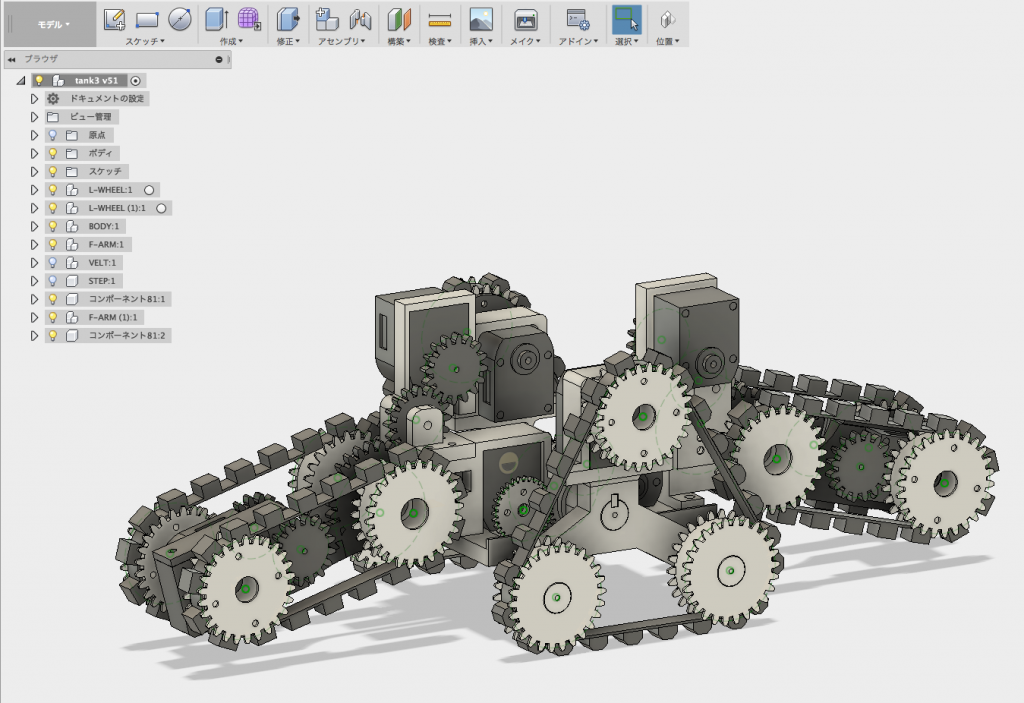
近藤科学のKRS3301があったので、このモータを使ったクローラーロボットを構想してみました。
WRSでは旋回性能を要求されるミッションもあるので、不整地走行の際の車高も確保し、なおかつ旋回性能も上げられそうな形状を考えて、1/3程度の寸法の階段を想定して登坂もできるようなクローラアームを設置してみました。
(まだアームを持ち上げる機構は煮詰めてません)
全体的に剛性もあげて動作も信頼性が向上するようにしたいとおもいます。