MISORAの部品が上がってくる前に、プログラム作成をすすめるためにMISORAと同じ機能を持つ小さいクローラロボットを製作しています。
名前はMISORA mini。
自宅の駐車場で走らせてみました。


各種ソフトウェア開発および試作設計支援、パソコンサポート
MISORAの部品が上がってくる前に、プログラム作成をすすめるためにMISORAと同じ機能を持つ小さいクローラロボットを製作しています。
名前はMISORA mini。
自宅の駐車場で走らせてみました。
私の住んでいる地区で南相馬初の新型コロナの感染患者が出た影響で、現在使用している事務所に煩雑に行くことが憚れるようになりました。(気のせいかもしれませんが)
どちらにしても今よりももっとひどい状況になったとしてもそれに対応できるようなリスクヘッジが必要です。
そこで、自宅のあまり使っていない部屋に工作室を作ることにしました。
機械加工を自由にできるような部屋を製作するのが目標です(切り粉などが出ても気にならないような)
改造まえの部屋です。6畳ほどあります。

最初に2x4材を使って土台と壁を作りました。

次に窓側の壁を製作していきます。

壁がもう1面できました。
外からの光を取り入れるので窓を作りました。

もう1つの壁を作り部屋らしくなってきました。
こちら側にも窓を作りました。

入り口側の壁も作って部屋ができました。

CNC、卓上旋盤、ボール盤、バンドソー、万力などをワークディスクにセットしました。
これで一通りの機械加工ができるようになります。

ほこりが舞うような加工をしても部屋全体を汚さないように天井に角材を取り付けました。
ここに毛布とかブルーシートを被せることができるようになります。

加工するときには明るい方がいいので移動可能なダウンライトを取り付けました。
LED照明なのでかなり明るいです。

最後に壁紙を貼って完成です。
カーテンの色に合わせてネイビーにしてみました。
汚れも目立たないと思います。
これで、自宅でも機械加工を存分に行えるようになりました。

南相馬にあるRTF(ロボットテストフィールド)で行われるロボットの世界大会WRS2020。
新型コロナの影響でどうなるのかなと思いますが今のところ予定通りとのことで。
しかし、今月予定していた県の発表会とか市へのお披露目会などがなくなってしまったので、その分、設計と製造を進めております。
設計チームは4社。
・ベースマシン設計がYUBITOMAさん。
・アーム設計はタカワ精密さん。
・ハンド設計は菊池製作所さん。
・コントローラメカ設計、MISORAの制御設計、配線、プログラミングがTakerusoftwareになります。
なので、MISORAが組み上がった去年末から今もずっとMISORAにつきっきりで製作してます。
火入れなどは1月中に終わり、一通り動くレベルにはなりました。
しかし、それは単に動くというだけ。
ここから色々なアイディアを出してより使いやすいロボットに仕上げていきます。
MSIORAの面白いところはコントローラもロボットであるということです。
ロボットをロボットが操作する。
これにより、人をアシストするようなコントローラができます。
次第に思い通りに動くようになるMSIORAを見ててふと思うのは、最初に私が作ったコンセプトクローラからよくまあこんなにしっかりしたロボットができたなぁということ。
コンセプトクローラは小さい模型なので、いろんなことを無視して設計できます。
それは部品が小さく軽いので変形とか摩擦とかモーメント荷重とかほぼ無視してやりたいことだけを形にできるからです。
MISORAクラスの設計になるとこの無視する事柄が様々な制限になり、設計は容易ではありません。
それを一発で動く形にしてしまうのだから、この3社はすごいなぁと身内ながら感心してしまいます。
4足歩行ロボットを製作しておりましたが残念!
消費税が8%→10%になりますので、請求書のデータベース を対応させてみました。
フォームに数値で税率をパーセントで設定し(デフォルトは0.08のまま)、税込みチェックボックスを配置。
請求金額の計算フィールドに以下の計算式を追加。
税抜き価格*IF(税込みチェックボックス;(1+消費税パーセント);1)
ifを使ってチェックボックスがONの時に1.08、もしくは1.10の値を、OFFの時は1をそのまま返すようにすればOK。
TapFormsというmac用のデータベースアプリを使っています。
文書や資料の管理などに便利に使えていますが、何か生産管理的なものも作れるのでは?と思ってこんなものを作ってみました。
加工単価リストには加工名と単価が書かれてます。

作業票は加工者がiPadなどで入力を行います。
部品ごとに決められた製作番号や加工完了時間、加工工程名称、従業員コード、加工にかかった時間などを記録すると加工金額も自動で計算します。
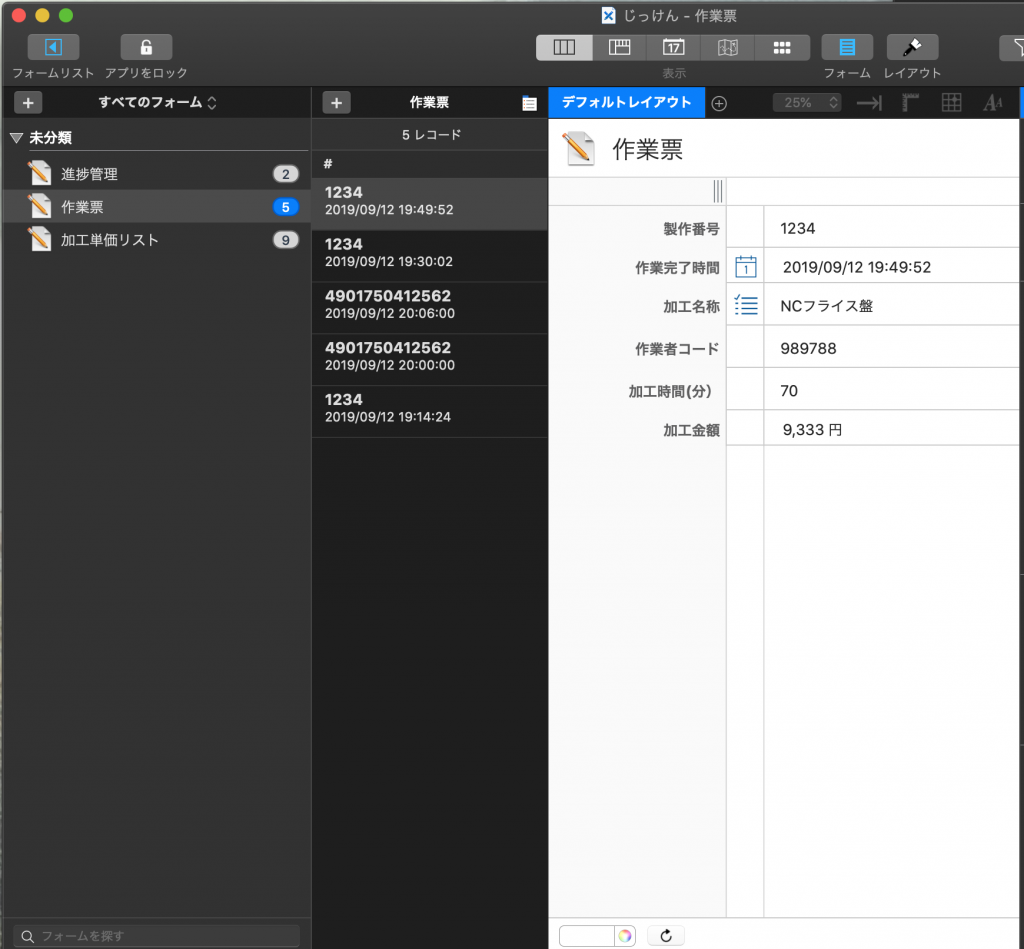
そして、進捗管理を開くと部品ごとに加工工程や作業者コード、加工完了時間、加工金額の集計などがわかります。
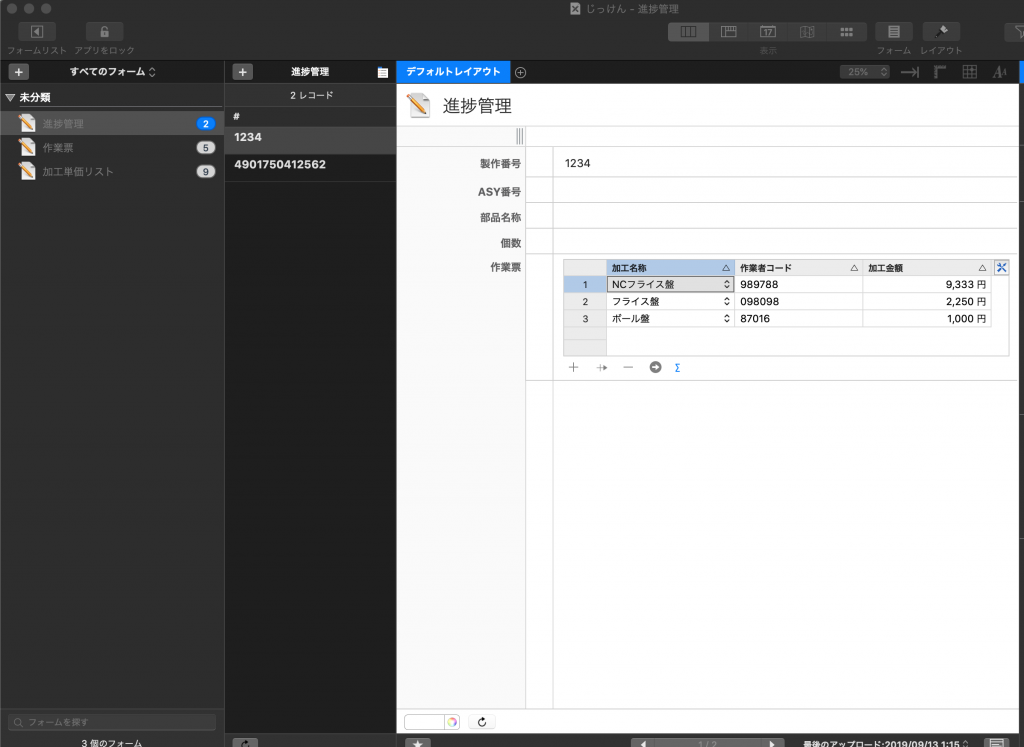
検索機能も豊富なので、特定の作業者の加工時間や1ヶ月の加工金額などを合計することも簡単にできます。(意味ないかな?)
スクリプトなども使えるので、他のフィールドの条件で自動的に値を変更することも可能。
試しに完了が上がった製番があった場合、マスター製番リストのところに完了の○を書き込むスクリプトなどを書いてみました。
意外に使える感じです。
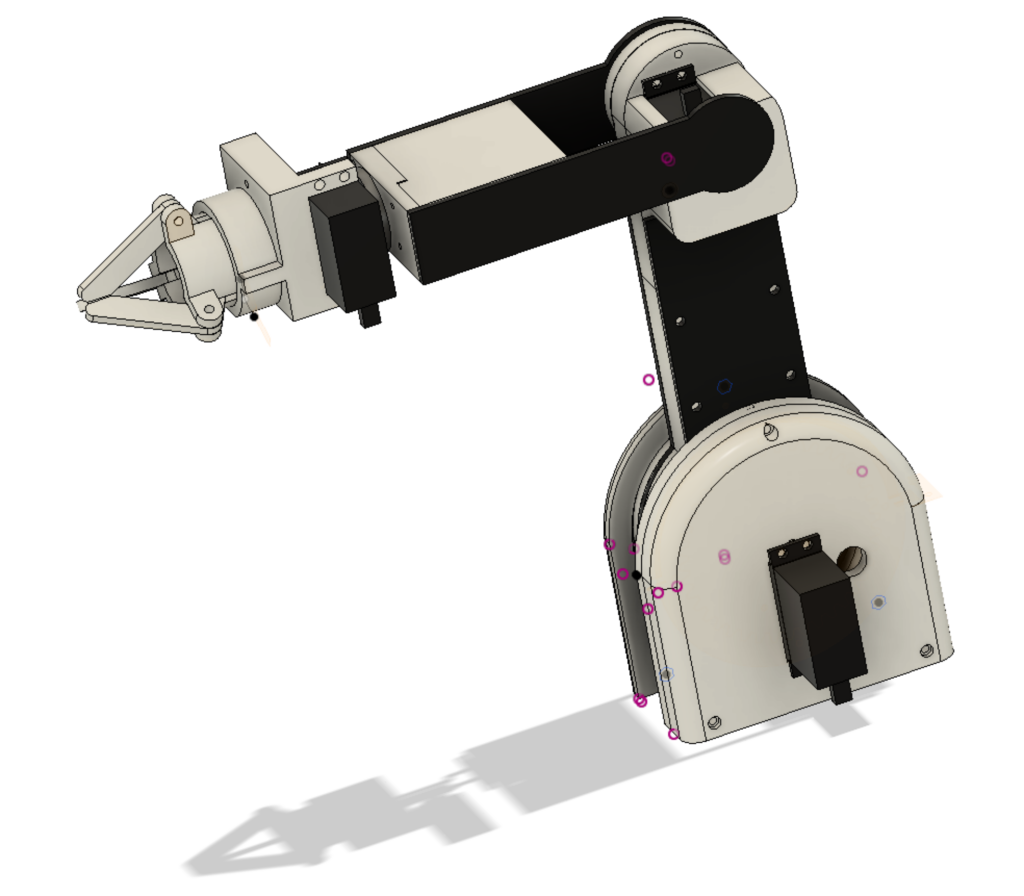
地元高校で技術指導を行う依頼があり、そこで使うロボットアームを構想しました。
【メカ的なコンセプト】
・肩部分は減速機を使い、大きいモーメント荷重に耐えられるとともに減速機の仕組みを理解してもらう。
・ハンド部分は3つ爪を使用し、リンク機構の理解をしてもらう。
・指先やアーム長などは3Dプリンタ用データを提供することで自由に改造できるようにする。
【制御的なコンセプト】
・現状のクローラロボットに載せるだけで使えるように分離した制御を行う。
・多軸の面倒な制御を簡単に操作するUIを学ぶ。
・arduinoの使い方を覚える。
このような感じで考えております。
問題は費用かなぁ。
大きいものを造形するのに材料も時間もかかること、試作を数回行って問題点を出して形状の改善を行うことから多少お高いです。
とはいえ、設計・加工・組立・調整・制御まで入っているのでものすごく高いというわけではないのですが・・・。
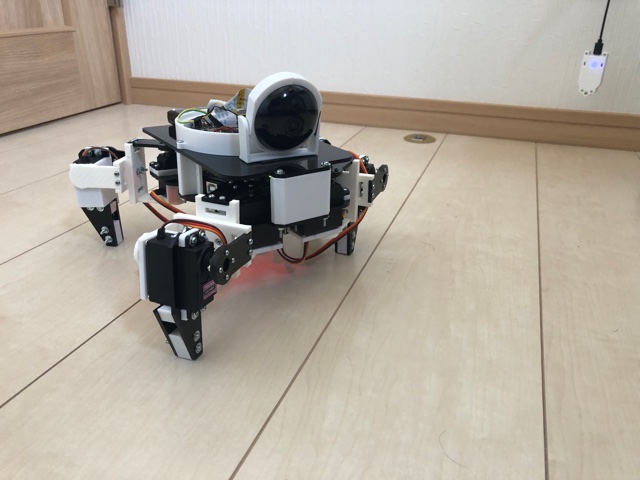
スマホと連動できるカメラを歩行ロボットに搭載しました。
もともと管理カメラ用のアプリもあるので、そこからパンとチルトをさせているステッピングモータの信号を取得。
それを使ってロボットをコントロールしてみました。
カメラ映像も手元のスマホでコントロールできますし、このままで録画をしたり動体検出モードで待機させることもできます。


部品の加工が完了したので組み立ててみました。
左右の車輪ユニットと本体を接続する方法はもう少し剛性をあげたい感じです。