県内の高校からマイコン制御の技術指導の話が来ました。
6輪ローバーロボットをマイコンでコントロールしたいそうです。
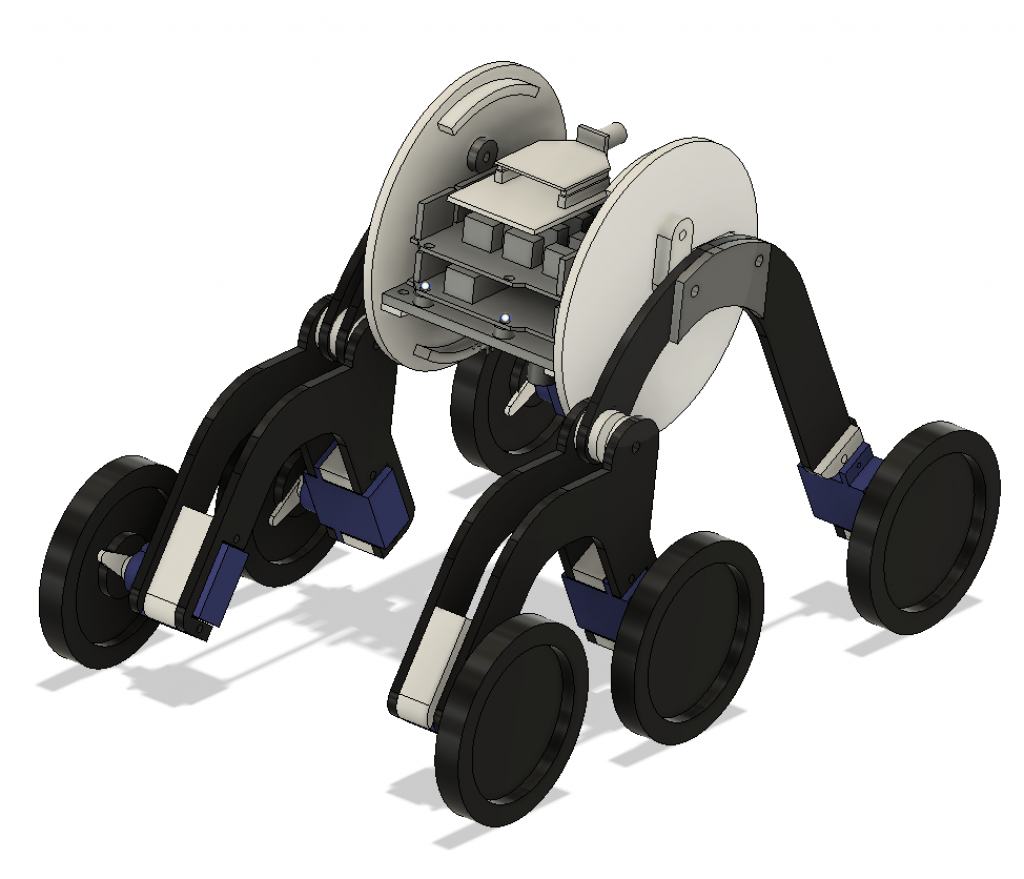
そこで、ローバーロボットを設計してみました。
ロボットに関する情報を調べると、6WSのような感じでステアリングを切れるものが多いのですが、クローラのような極地旋回ができるか実験してみたいと思います。

各種ソフトウェア開発および試作設計支援、パソコンサポート
県内の高校からマイコン制御の技術指導の話が来ました。
6輪ローバーロボットをマイコンでコントロールしたいそうです。
そこで、ローバーロボットを設計してみました。
ロボットに関する情報を調べると、6WSのような感じでステアリングを切れるものが多いのですが、クローラのような極地旋回ができるか実験してみたいと思います。

弊社で設計・製作を行った、コンセプトクローラロボット(試作クローラロボット)が広報みなみそうま6月1日号に掲載されております。
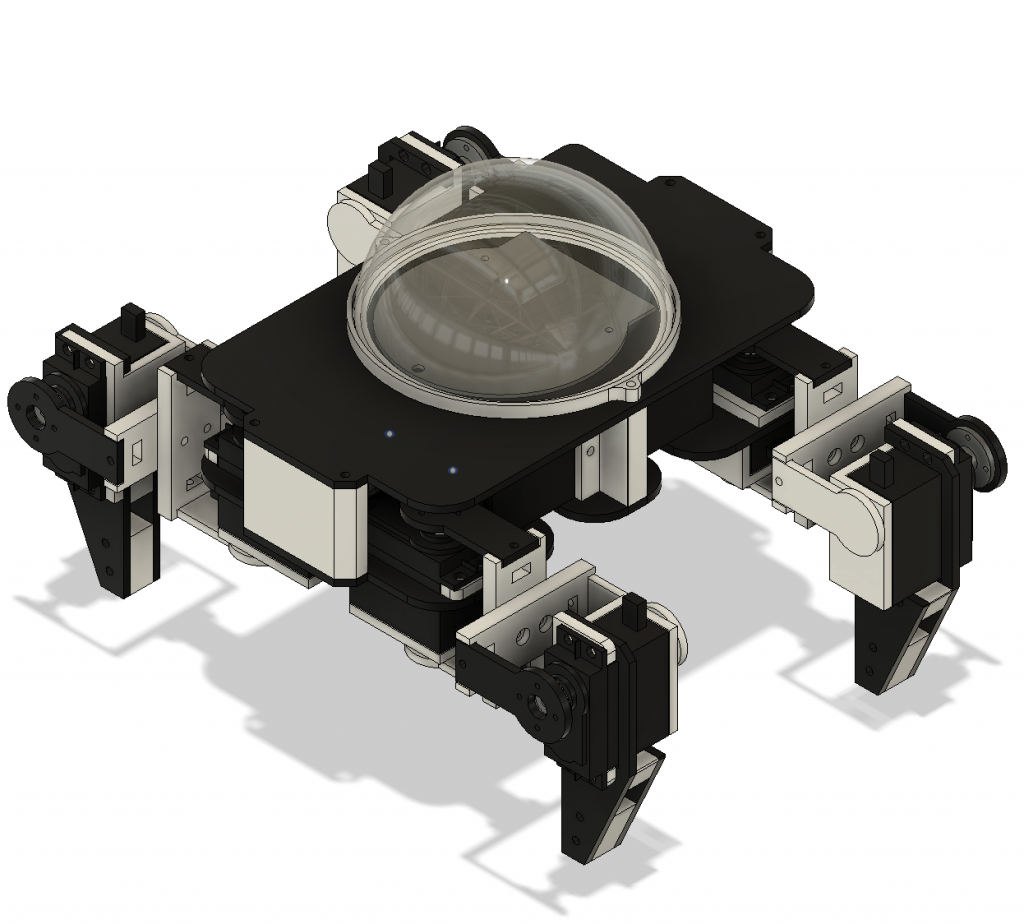
現在、南相馬の企業が集まりワールドロボットサミット2020に出場すべくロボットの設計を行っておりますが、その設計コンセプトや実機で想定される問題点などを事前に検証するためにコンセプトクローラロボットを弊社で製作しました。
ロボットはプラント保守点検作業ミッションに投入されるため、悪路走行や階段の昇降、バルブの操作などを必要とします。
それらの作業をいかに直感的に作業できるか検証するためのロボットが写真のロボットになります。
15個のサーボモータとマイコン、カメラやビデオトランスミッタなどを搭載し、遠隔作業が行えるようになっております。
このロボットの実機試作版を年内中に製作する予定です。
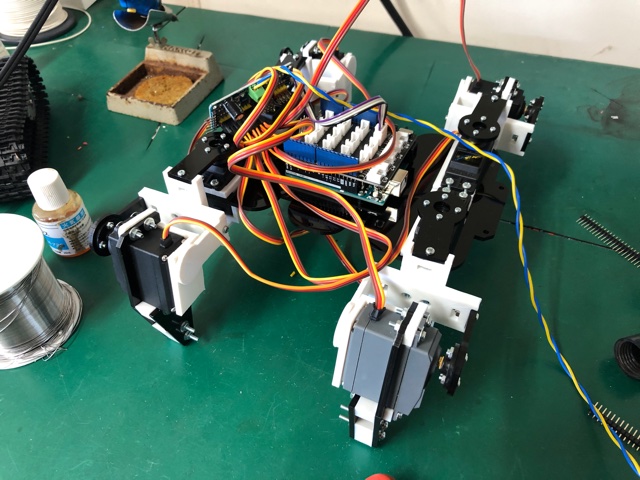
arduinoとi2cのPWMボードを接続。
あとは電源をつなぐと動かせる様になります。

設計から製造までを自前でできるので速さも弊社の強みです。
プロトタイプを設計し、実際に可動域を現物で確認すると強度的に弱い部分などが見えてきます。
昔は部品加工も大変な作業でしたので、十分に検証してからでないと物が作れませんでしたし、手直しも大変でしたが今は時代も変わり簡単に製作することができます。
なので作りながらブラッシュアップするようなこともできます。
単に動作させるだけでなく、実用的なものを思いつき設計中。
市販のアレを組み合わせると面白いかなと思いました。
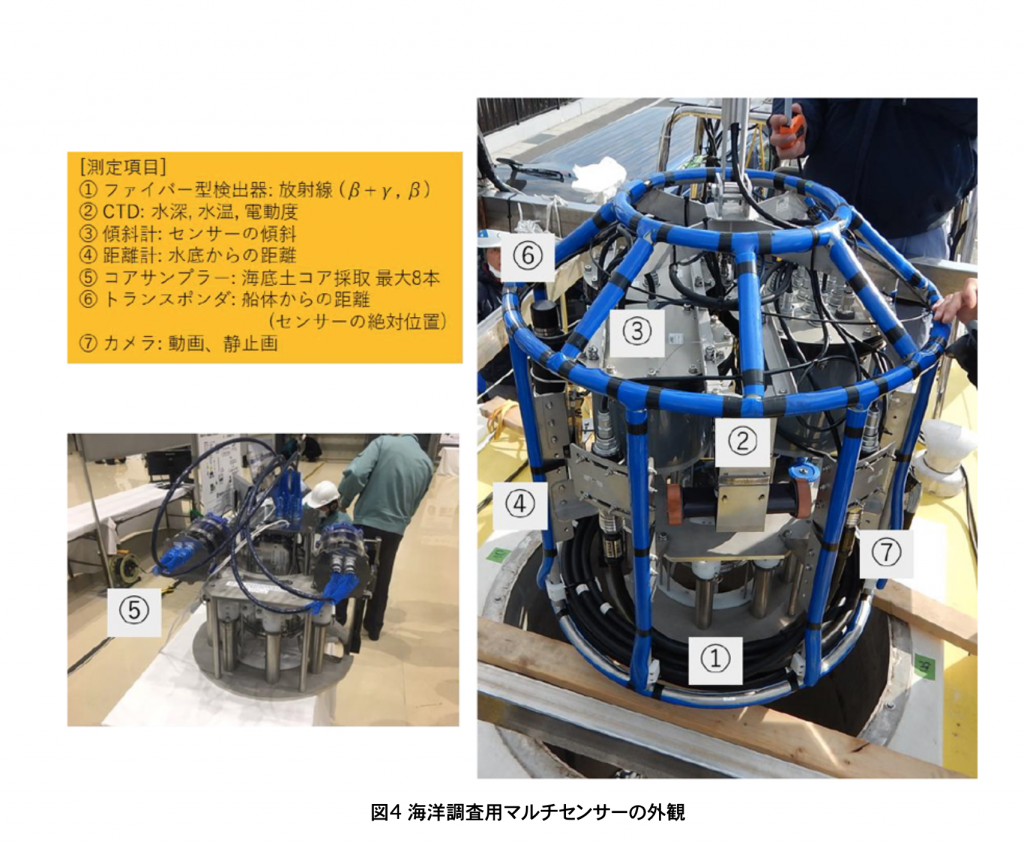
弊社も協力し製作した海底の泥を採取する「採泥装置」を搭載したマルチセンサー装置がプレスリリースされました。
・JAEAプレスリリース
測定・サンプリングなど多目的に使用できる“海洋のドローン”の開発
・日経新聞ブレスリリース
無人船で海の深さや放射線を測定、原子力機構
あまり弊社の名前が表に出ることはありませんが、今回は協力企業の1つとして「Takerusoftware」の名前が載っております。
先日、南相馬市ロボット産業協議会のWRSメンバーと会津大学殿との懇親会があり参加しました。
懇親会前に弊社が現在製作しているコンセプトクローラロボットのデモを行い評価していただけました。
その時の意見を元に操作系を刷新してより直感的な操作系インターフェイスを構想しております。
その後の懇親会では、様々な有益な意見交換が行えました。
参加した方々はみなものづくりのエキスパートですから、集まって話をすると面白い意見がでて楽しいですね。
JAEA殿が企画している無人測定船に搭載する、海底の泥を取ってくる「採泥機」の接続試験を茨城県のJREC殿の工場で行いました。
JREC殿の装置は放射線の測定や観測用水中カメラ、水質解析用の機器などが取り付けられているケージで、そこに採泥機を取り付ける形になります。
採泥機は、JREC殿の設備の一部になり、ネットワーク上から操作を行えるようにしました。
PLCにWEBサーバ機能を実装し、クライアントPC(タブレット、スマホなども含む)から操作できます。
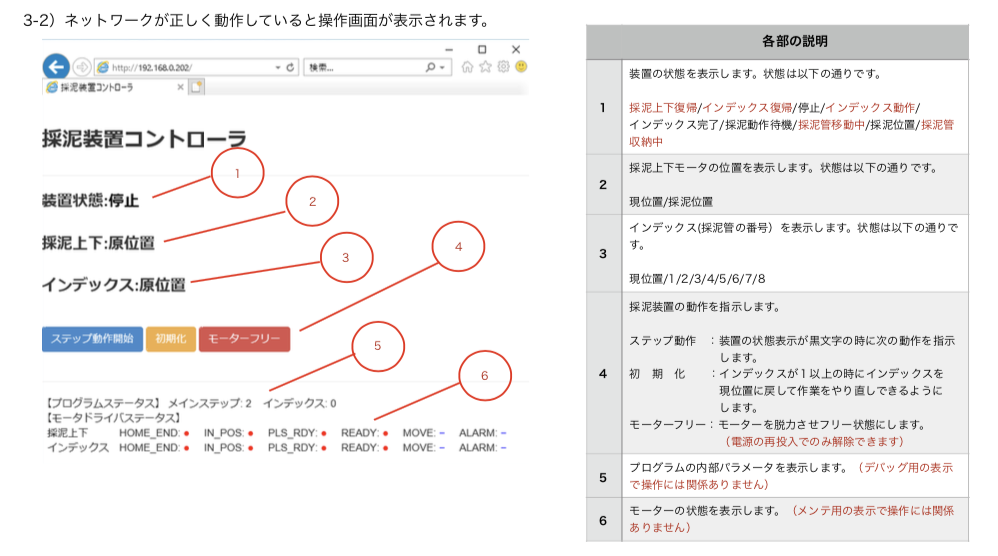
操作画面はこの様な感じで、採泥作業を8本の採泥管を交換しながら行いますが、「ステップ動作開始」ボタンを押すことで、順序立てて作業が行えるようなっております。
また、装置のサーボモータの状態は画面下に表示されており、異常があった場合にはすぐにわかる様になっています。
今週末に船に搭載するクレーンと接続する試験を行い、来週には実際に松川浦にて採泥試験を行う予定です。
装置全体の写真も撮影しておりますが、まだ公開できないので時期が来たら掲載したいと思います。
キビタンGO!〜ふくしまからチャレンジをはじめよう〜という番組でそうそうこども科学祭の様子が放映されました。
福島テレビのyoutubeチャンネルからご覧いただけます。
番組のページ
弊社の紹介は特にありませんが、番組の一番最後に子供達が遊んでいる様子があり、そこで使われているロボットが南相馬ロボット産業評議会の会員さんが作ったロボットになります。
来月から南相馬ロボット産業協議会のロボット分科会の2ndシーズンが始まります。
前回は、無線操作のクローラロボットを製作しましたが、今回は自立動作の名刺(カード運び)ロボットを製作しようと思います。
このロボットは名刺を手に持たせると、10秒後に180度反転して前進し、停止します。
相手が名刺を取ると、また180度反転して戻ってきます。
名刺を渡すたびに同じ動作を繰り返します。
